Ideas? Bugs? Questions?
This is our first preview of the NearZero discussion engine. We'd love to improve it, and help you out if you have questions.
Email Steve Davis or call him:
650.704.5975
Reload Discussion
Steve Davis3. Could rigid wings be improved so as to better survive crashes?
Not sure that anyone wants to talk about crashes. ;-) Believe that all are already factoring in a need for crash survival, but this is secondary to performance geared to ensure that crashes would be very rare events. Would rather see research money offered in support of developing robust algorithms to minimize the potential of loss of control and for doing aerodynamic studies. Design work to develop wings, blades and flexible kite shapes specifically suited to capturing maximum energy with maximum control and in some cases considering the need for minimal audible noise production requires delicate balancing of tradeoffs.
Steve DavisPlease comment on what reasonable regulation of the airborne wind industry might look like, and to what extent the systems under development could be hamstrung by specific regulations.
My preference is to give this very careful thought and to work with others in the AWES industry to ensure that we are using consitent terminology before responding individually to the FAA as the needs of various AWES will vary. At the same time there will be common needs. It could be helpful to focus on the commonalities here while being mindful that this is somewhat of an open forum in which what is said could endure past its useful life and not help us later.
Steve Davis3. What are the current limits in terms of size and cost of generators that fly versus those on the ground? i.e., how small and cheap can ground-based generators be and still be effective and long-lived? How do these generators compare with those that fly? Assuming comparable R&D, is it more likely that air-cooled motor/generators will become lighter and cheaper or that the high-gear ratio gearboxes and winches will become better and cheaper?
This would be a good masters thesis project for someone outside the industry that has the time and perspective to look into both objectively.
Steve Davis2. Is it possible to begin quantifying the safety advantage of systems with motor/generators aboard? How much less likely do you think these systems are to stall and crash?
Much less likely to stall and crash, but when they do potentially resulting in a less pretty pile of less reusable material as compared to a flexible kite biting the dust.
Steve DavisWhat is the lowest cost, fastest paced, and most robust method of getting over that developmental entry barrier? Of gaining a gigawatt's worth of real world confidence in airborne wind power systems?
The most important things could be avoidance of crashes during public demonstrations of the technologies and not bringing products to market before rigorous testing over a year has been conducted at average target sites, not just optimum target sites. Significant financial support will be required.
Steve Davis1. For systems with airborne generators, what specific components are most likely to fail (e.g., servos, tethers, generators, electrical conversion systems, etc.), and how can R&D improve the reliability of these components? What are the uncertain parameters (e.g., breaking strength of a year-old tether) involved?
In the proof of concept phase, which is where many efforts are currently, this question might be a little early. It appears that most efforts have given at least some thought to operations and maintenance even though this is typically addressed with greater rigor in designing models intended for the production line. Tethers and other components that would experience significant mechanical wear would be at the top of the list. Continued tether materials research could benefit the industry.
Steve Davis"What is the lowest cost, fastest paced, and most robust method of getting over that developmental entry barrier? Of gaining a gigawatt's worth of real world confidence in airborne wind power systems?"
Philanthropic, governmental or angel investor R and D funding is needed and would be the most efficient method. A team of the brightest brains needs to have the dwell time and facilities necessary to hatch truly revolutionary solutions to complex ideas such as AWE. Many of us feel we are close, but how many have the means to devote 100% of one's efforts to this noble cause? Skunk works are expensive! So I see it needing funding sources that can weather taking a chance on the long term potential.
Steve DavisCan you imagine airborne wind energy being deployed at the terawatt scale?
Yes I can imagine it. However I think that it may be a while before the necessary interest and capital can be accumulated to support such a massive effort to get that scale off the ground. I also think that "small is beautiful" and that not only is there a sizeable market for off-grid remote applications, there are many paople that would love to personally invest in a energy harvesting device that would allow them to withdraw from the current grid so as to lessen their carbon footprint and dependency on fossil fuels. Currently solar cells on the roof require substantial government subsidies and the break-even point for individual households (after very large up-front investment costs in the tens of thousands of dollars -$35k typically) is something like 8 years. If we could offer the "outer-suburbanites" a TWT (tethered wind turbine) device for somewhere near $1500, I am convinced that there would be huge interest. Payback could be seen in the realm of 8 to 12 months rather than years.
Mark MooreI'm curious to hear a reaction to the new FAA circular on AWE airspace access. For the most part this is what I expected, that the FAA will use Part 77 as the mechanism to control AWE access to the airspace. I think this is a managable and appropriate solution path, that provides the easiest, fastest way into use. However, the limitation to 500 ft is quite a severe limitation (given that Part 77 permits up to 2000 ft). I don't think a 500 ft restriction is useful enough - as from our studies it's really important (even in the developmental stages) to show the additional benefit from flying at 1000 to 2000 ft. Any other comments - many things are still not clear, such as the degree of lighting and tether redundancy burden that will be required. At least this is one clear step forward, and we can get past AWE talking about completely new regulations, or using Part 101. What are your feelings?
I think the key line in the announcement is . . .
"Accordingly, the FAA announces that the provision of part 77 will apply to temporary AWES proposals that will be used for data collection purposes."
Italics and bold, my emphasis.
I'm reluctant to say too much in this public forum but I think all AWE developers must decide exactly what safety requirements we - as the experts of this industry - think will be possible for us to implement while still allowing adequate and extensive flight testing that will lead us to eventual commercial feasibility of our systems. I first applied to the FAA in 2008 for exceptions to current rules and it has taken three years (almost to the date of my application), so I know nothing is going to happen quickly with the FAA. Therefore I see this as a multi-stage process we must negotiate with them.
First, and most important are the requirements for testing.
At a minimum, in regards to the potential ARPA-E challenge competition, flight below 500 feet and only in daylight hours will be possible only in Phase-1 of that challenge (which is why we designed it that way). Phases 2 and 3 will require night-time flight and at altitudes higher than 500 AGL. While we could conceivably go to some Caribbean nation willing to give us exclusive airspace to do that testing (and we've started that conversation with Barbados), it would be much less expensive and more convenient for us all to do testing on US soils.
Whether the ARPA-E challenge happens or not, we will all soon need to perform test flights above 500 feet and longer than just daylight hours. Therefore, we should come up with an option acceptable to the FAA to do long-term continous flight testing. Perhaps it's by having them designate a half dozen permanent test flight areas on US soil that we could all use? Perhaps it's an approval process for areas we individually select that meet some sort of standards - class G airspace, no people, no structures, etc.?
Along with altitudes and hours concerns, I'm very concerned about the requirements for "marking and lighting". I've email RJ Belanga at the FAA for clarification of whether AWE systems are currently expected to conform to the AC 70/7460-1K chapter regarding "moored balloons and kites", or some other chapter in that document. No response yet. If we are all required to have tether flags every 50 feet and multiple medium intensity anti-collision lights on both the flying vehicle and every 350 feet along the tether, we will all have some serious difficulties meeting those requirements in the short-term and getting the sort of fail-fast, fail-often, fail-cheap testing done that we all need.
Second is the eventual matter of commerically viable systems flying at altitudes higher than 500 feet and what sort of marking and lighting requirements those systems will require. Because we all have plenty of development and testing to do before we get to this stage, I think as a group we should all agree on what we can do for the testing phase and be concerned about commercially viable systems when we have them ready.
If anyone would like to join me in developing a set of marking and lighting requirements we could live with in the short term for testing purposes, please email me privately. dimitri@highestwind.com
Mark MooreI'm curious to hear a reaction to the new FAA circular on AWE airspace access. For the most part this is what I expected, that the FAA will use Part 77 as the mechanism to control AWE access to the airspace. I think this is a managable and appropriate solution path, that provides the easiest, fastest way into use. However, the limitation to 500 ft is quite a severe limitation (given that Part 77 permits up to 2000 ft). I don't think a 500 ft restriction is useful enough - as from our studies it's really important (even in the developmental stages) to show the additional benefit from flying at 1000 to 2000 ft. Any other comments - many things are still not clear, such as the degree of lighting and tether redundancy burden that will be required. At least this is one clear step forward, and we can get past AWE talking about completely new regulations, or using Part 101. What are your feelings?
Mark, I completely agree that the 500 ft. limit is too restricting. I think that the AWE players should use the public comment forum (deadline Feb. 6) to make this case to the FAA. Also, I'm wondering if there might be exemptions granted to the 500 ft. limit now that the FAA has a regulatory bin into which AWE systems can be placed. Our experience to this point has been that they would not grant an exemption to part 101 because they were not convinced that we fit into part 101. I also think that the 500 ft. limit may be more restricting to the ground-gen systems that the fly-gen systems.
For autogyro systems (a category into which I may have mistakenly included flygen devices such as Makani) I think that controls and materials need more development. Especially materials and especially the development of lightweight high conductance tethers. The system hardware for those designs has already been explored to a large extent. For fixed wing (Ampyx, KiteNRG, Windlift) I think that materials, controls, and hardware require attention. High strength, light weight, low cost materials for wing construction, robust control algorithms for long term reliability, and compact reliable generators and steering systems.
I do not think that balloon-based AWE has much potential.
Can you imagine airborne wind energy being deployed at the terawatt scale?
Scalability of airborne wind power I think primarily comes down to economics; if it is cheap enough (less than the cost of coal), the market will scale it into the terawatts.
1. How could the cost of rigid wings be drastically reduced?
This is a bit of a leading question, from a materials perspective, rigid wings are already inherently cheaper than soft wings - of the same power, as the strength to cost ratio of the materials is less. Mass production of rigid wings will make them inexpensive, when they are ready for mass production. Control and power extraction systems are required regardless.
2. How might R&D improve controllability and performance of fabric structures in variable wind conditions?
The line between soft and rigid kites is not necessarily absolute. A R&D path that is not uninteresting is to use ram air boost systems to create aircraft like semi rigid inflatable structures, which can still be deflated and packed. Such over pressure designs are capable of much higher performance than traditional kites, more inline with rigid wings, and can be design to fly through much greater turbulence, including what I might refer to as negative lift events. With higher performance, heavier fabric coatings can be used, combined with the fabric surfaces being held more rigidly, the longevity is also likely to be far greater than for a traditional kite.
3. Could rigid wings be improved so as to better survive crashes?
For grid scale airborne wind power systems, I do not think crashing is acceptable, period, whether for soft or rigid systems. If there is enough power to generate useful electricity then there is enough power to do serious damage. Soft kites hitting the ground at reasonable speeds are very dangerous and rarely survive. Crash avoidance and mitigation is necessary regardless.
Flying versus Ground-based Generators
Ground based generators have severe gearing problems, even worse than traditional wind turbines where gearboxes are a large proportion of total costs. This places a fundamental limit on how low cost they can be. Largely independent of scale (unlike winch systems), flying generators do not dominate wing weight, the wing will be the approximate weight it is regardless. Flying generators include a solution to the launching and landing problem and add the ability to recover without crashing. They can provide a safe hover and emergency landing mode, useful if a flock of birds, private plane, or whatever, invades the airspace.
Regulation
This one worries me, although I will note that traditional wind turbines already exceed 200m in altitude with designs planned that may exceed 300m. The advantage of airborne wind power is in the ability to sweep more sky for less money, an airborne wind power system that stays below 300m should still be able to generate electricity for far less than a traditional wind turbine and scale to a level sufficient to help solve the world's energy problems. The potentially low cost and scalabilty of airborne wind power is not dependent on going above 300m.
Below is a rough sketch of the kite on a stick system I have spent some time working on, including numerous prototypes (I should really publish this work at some point). It should be able to scale into the tens of megawatts and ultimately achieve machine costs as low as $0.03/kWhr. With tensegrity design, the tower costs are greatly reduced over a traditional wind turbine tower, and the installation and maintenance is much easier (tower can be easily raised and lowered). Ultimately, a pure kite power system should be cheaper, however, this system is likely more regulation friendly, development friendly, and NIMBY friendly. It is perhaps a more viable small scale wind power solution, capable of much lower cost than traditional wind turbines while operating at the same sites - close to habitation. I merely present it here to show that there are potentially fast and low cost technical solutions to the regulation and confidence problems of airborne wind energy. Such systems could I suspect greatly help with accelerating the technological progress (a forgiving rigid wing test platform), and regulatory and market acceptance of pure airborne wind energy systems.
I'm curious to hear a reaction to the new FAA circular on AWE airspace access. For the most part this is what I expected, that the FAA will use Part 77 as the mechanism to control AWE access to the airspace. I think this is a managable and appropriate solution path, that provides the easiest, fastest way into use. However, the limitation to 500 ft is quite a severe limitation (given that Part 77 permits up to 2000 ft). I don't think a 500 ft restriction is useful enough - as from our studies it's really important (even in the developmental stages) to show the additional benefit from flying at 1000 to 2000 ft. Any other comments - many things are still not clear, such as the degree of lighting and tether redundancy burden that will be required. At least this is one clear step forward, and we can get past AWE talking about completely new regulations, or using Part 101. What are your feelings?
Steve DavisCertainly terawatts will involve thousands or tens of thousands of installations. The point of the question is whether you believe that the airborne wind energy industry as a whole can eventually meet a significant percentage of global energy demand.
Ok, it's clear now... the core of your sentence is, in my opinion, in the word "eventually". :) So, *how* long does it take to reach such a target?
1 TW is still a huge figure for almost each kind of energy, as showed in this picture
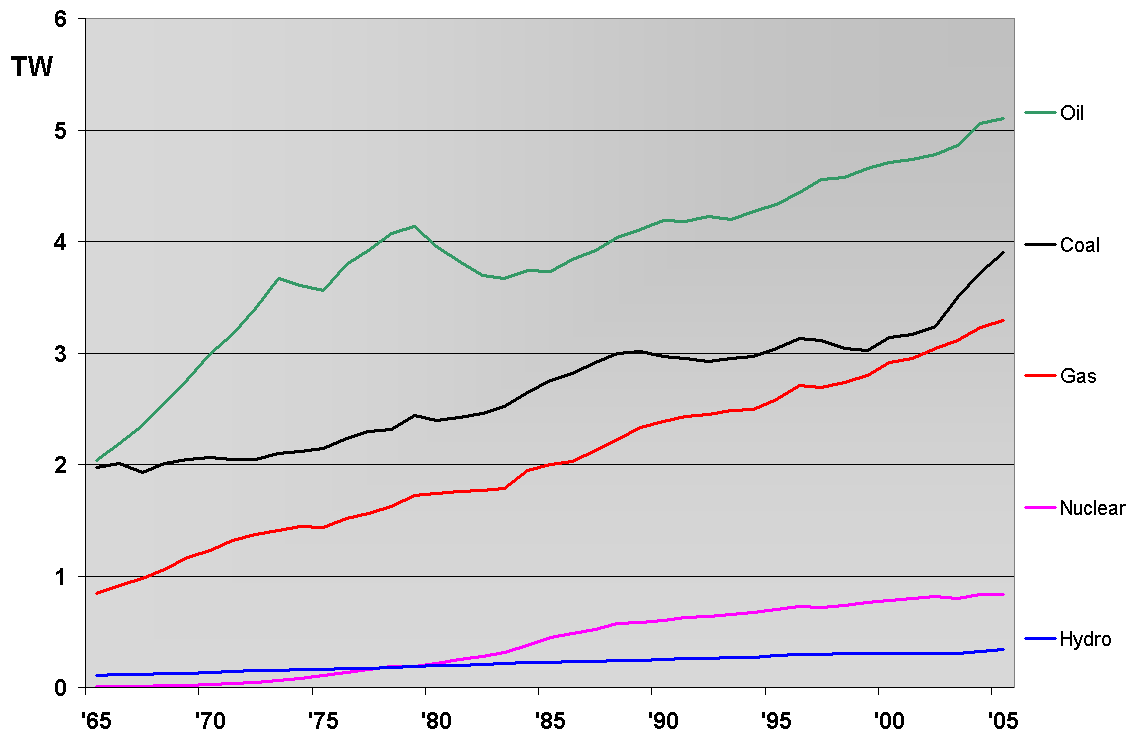
still, I think that it could be feasible, hard but feasible.
Carlo PerassiIt's hard to click on "agree" or "disagree" because I'm not sure what this question is about... TeraWatt is something we can reach only with clustering and gridding hundreds of plants. So it's not about airborne, solar, carbon or whatever: it's about the system as a whole.
Certainly terawatts will involve thousands or tens of thousands of installations. The point of the question is whether you believe that the airborne wind energy industry as a whole can eventually meet a significant percentage of global energy demand.
Damon Vander LindAre there similar safety mechanisms for soft kites? I remember we employed an 'emergency release' at some point for our soft kites. It released at a set altitude, probably around 15 meters, giving the soft wing time to decelerate before it hit the ground. This saved quite a few kites for us. Simply spooling out a large chunk of line helps if line handling goes well, but could be dangerous if there is a problem with line handling on the winch (eg, excess reeled-out line getting stuck on the winch)
Yes, Windlift uses a 3 line system that automatically depowers the wing when it gets to close to the ground. We have had commercial off-the-shelf kiteboarding kites survive nearly 100 unscheduled landings in soybean and cotton fields with very minor damage. Our custom wing had poor puncture resistance, and after 15 unscheduled landings was leaking air from the leading edge. However our Cabrinha kite never suffered a bladder leak after many crashes. There is still a significant amount of clever design work both in the tether and the wing itself that could improve this performance even more.
Gust tolerance can also be both actively and passively compensated for, making a redundant system with excellent survivability in a wide range of weather conditions. Making the wing as cheap and recyclable as possible will also be important to improving the economics of mobile, kW scale machines.
The lines of any AWE system are dangerous. As any experienced sailor or fisherman knows the rigging lines need to be respected. Hopefully with a little training this risk can be appreciated, and compensated for.
Crosswind kite power utilizing fixed wings is the most promising application of AWE. Crosswind systems allow for higher power outputs with a smaller wing with higher capacity factors. The smaller wing has advantages in launching, retrieval, and survivability in gusts. Rigid carbon fiber fixed wings hold the greatest promise for MW scale devices, and there is still much exploration to do with flexible fabric wings for mobile 10-50 kW scale devices. Fly gen systems will have a lower levelized cost of energy (less tether wear), but require MW scale to optimize performance. Ground gen systems offer advantages for smaller kW scale machines, but require new wing designs and more advanced control automation schemes. Tether drag kills the advantages of any AWE system flying over 1 kM, and advantages are diminishing over 500 M.
Steve DavisCan you imagine airborne wind energy being deployed at the terawatt scale?
It's hard to click on "agree" or "disagree" because I'm not sure what this question is about... TeraWatt is something we can reach only with clustering and gridding hundreds of plants. So it's not about airborne, solar, carbon or whatever: it's about the system as a whole.
That said, at the moment I can't seriously think about an AWE plant larger than 1 GW, clustering systems as Lorenzo Fagiano wrote and even this scenario is almost SF at the end of 2011.
Joe FaustCross-wind an army of kite trains driving a loop bus cable driving a large generator; use long-strong arrangement. One pulley and one generator. Farm this tactic. Soft wings. Groundgen.
Meant to write "long-stroke arrangement" in above line.
Steve Davis1. How could the cost of rigid wings be drastically reduced?
Steve DavisWhat is the lowest cost, fastest paced, and most robust method of getting over that developmental entry barrier? Of gaining a gigawatt's worth of real world confidence in airborne wind power systems?
Cross-wind an army of kite trains driving a loop bus cable driving a large generator; use long-strong arrangement. One pulley and one generator. Farm this tactic. Soft wings. Groundgen.
Summarizing recent comments by: Mark Moore, Guido Luetsch, Alexander Bormann, Saul Griffith, Damon Vander Lind, Douglas Amick, Corwin Hardham, Dimitri Chernyshov, Martin Hoffert, Allister Furey, Joe Faust, Pete Lynn, Rob Creighton, Lorenzo Fagiano, Becker van Niekerk, and Dave Santos.
Potential Scale of Industry
Very few of you responded to the question of whether you believe airborne systems could ultimately compete with other energy sources to supply power at the scale of terawatts, but those that did were optimistic. Although subjective, it seems worthwhile to establish whether this might be a view shared by all or most of this diverse group..
Can you imagine airborne wind energy being deployed at the terawatt scale?
Fast and Cost Effective Paths to 1 GW Cumulative Airborne Wind Generating Capacity
Of the two participants who allocated R&D among small (less than 100 kW), medium (500 kW - 10 MW), and large (greater than 10 MW) markets, Lorenzo Fagiano emphasized the need to develop airborne wind farms composed of large scale devices because of the substantial costs associated with the land and airspace that is occupied. Dave Santos subsequently made a similar argument regarding the large land footprint that would be required for a farm of small-scale devices in order to power a large city.
On the other hand, Rob Creighton, allocated 40% to fund "small, mobile AWE systems that can serve [off-grid applications in remote areas] can have an immediate impact on the developing world." Along the same lines, Dimitri Chernyshov cited research his firm has done suggesting that a market exists for 30 kW systems in the rural U.S.
The location and size of the market that will be served by AWE thus seems to be a source of disagreement as to where R&D dollars should flow: Some of you have in mind a goal of utility-scale facilities located in populated areas near large cities, while others are thinking about providing electricity to rural farmers and remote, off-grid areas of the developing world.
Others expressed a preference for an evolving approach, whereby R&D efforts are focused on small-scale devices but with an explicit goal of achieving larger-scale devices in the future. Pete Lynn summarized this view: "The development of a terawatt scale airborne wind energy industry [starts] with…the establishment of a small scale airborne wind energy ecosystem, a seed from which to grow something bigger."
Lynn also put the key question nicely, one which I would like to hear from more of you on:
"What is the lowest cost, fastest paced, and most robust method of getting over that developmental entry barrier? Of gaining a gigawatt's worth of real world confidence in airborne wind power systems?"
Fabric versus Rigid Wings
Discussion of fabric versus rigid wings raised challenges facing both types of systems. I'd like to dig into specific areas where R&D may improve these systems and/or reduce key uncertainties:
1. How could the cost of rigid wings be drastically reduced?
2. How might R&D improve controllability and performance of fabric structures in variable wind conditions?
3. Could rigid wings be improved so as to better survive crashes?
4. How would breakthroughs in durable fabrics enhance the feasibility of soft wing system?
Flying versus Ground-based Generators
Several comments also addressed the relative challenges of systems with airborne generators versus those with generators on the ground. These are critical topics that need further and more specific discussion:
1. For systems with airborne generators, what specific components are most likely to fail (e.g., servos, tethers, generators, electrical conversion systems, etc.), and how can R&D improve the reliability of these components? What are the uncertain parameters (e.g., breaking strength of a year-old tether) involved?
2. Is it possible to begin quantifying the safety advantage of systems with motor/generators aboard? How much less likely do you think these systems are to stall and crash?
3. What are the current limits in terms of size and cost of generators that fly versus those on the ground? i.e., how small and cheap can ground-based generators be and still be effective and long-lived? How do these generators compare with those that fly? Assuming comparable R&D, is it more likely that air-cooled motor/generators will become lighter and cheaper or that the high-gear ratio gearboxes and winches will become better and cheaper?
4. How might R&D improve reliability, durability and cost of winches?
High-Altitude
Regarding breakthroughs that are needed to make high-altitude systems feasible, several of you noted that tether drag and weight are the key barriers. Therefore, breakthroughs that could be game-changers are inexpensive carbon nanotube tether materials and lighter weight technologies for laser power transmission.
Regulation
After reading yesterday's notification in the Federal Register (http://1.usa.gov/uEUpee), I have invited Mr. Rene Balanga of the FAA to observe or participate in this discussion.
Please comment on what reasonable regulation of the airborne wind industry might look like, and to what extent the systems under development could be hamstrung by specific regulations.
Here is how dense crosslinked kite arrays can do about 100 times better by land or airspace usage than single tether electric kiteplanes. The 50sq m Makani reference wing occupies a crosswind-projected reserved airspace of 500,000sq m (1km x 1/2km). This is only a 1/10,000 "solidity" factor, so its not surprising the little wing cannot sweep up very much of the energy flowing thru its space.
We agree that the best soft wings are roughly 10 times the area of rigid wings by equivalent power (especially if you leave generators, conducters, etc. on the ground). KiteLab suggests a handy operational scale for soft array wings of about 100sq m; five such soft wings roughly match a Makani wing. One hundred such wings can be arched together across the same airspace, with plenty of spacing to avoid interference drag. Each one of these wings can lift a high L/D airfoil of 50sqm to be held semi-captive in the latticework, looping crosswind in close proximity to its neighbors, but constrained by the matrix from collisions. So now we have 100 Makani-equivalent wings doing their thing unencumbered by generators and avionics. Cleaner and lighter, they can develop more power, but lets rest this gedanken with a hundredfold improvement in performance from the same airspace and land footprint. Final frontal solidity is about 1/30, and the "large city" now only needs 5-25 sq miles of land footprint, 1/100th of Makani's model. This concept is supported by Prof. John Dabiri's findings (Biolocomotion Lab, Caltech) where a ten-fold increase in wind power extraction was demonstrated by unit land area by crowding many more slower turbines, as compared with conventional wind farms. In the case of AWE, the added vertical dimension roughly allows another tenfold gain in calculated potential.
Our latest estimate of kite fabric life is based on Pete's father's (Peter Lynn Sr.) experience with Dominico Goo's SkySilk ("worlds best kite fabric") of polyester sized with polyurethane. Peter Sr. reports that he had previously agreed with Makani that rigid AWE wings seemed advantaged until he bench and flight tested Goo's fabric after 14 months exposure to New Zealand UV and gales. This is consistent with KiteLab's independent study; the secret is the right polymer sizing with effective anti-UV additive. Kite fabric is paper-thin, but a composite wing is more like a five-hundred page book in thickness. The hybrid scheme above allows composite wings in the high-speed crosswind role, but "racing parafoils" might be good enough. The 15,000sq m total area is now a reasonable solidity of about 1/30. A large city only needs 5-25sq miles of land footprint with dense kite arrays, 1/100th of Makani's model.
The challenges to the dense hybrid array approach are mostly operational, its truly heroic sailing in the sky. Kites are handled by simple traditional means of furling lines, sleeves, and packs. The entire array is piloted as one "metakite/megakite" from powerful ground winches to drive the largest class of generators. Large machinery runs many decades with just routine maintenence. This scheme creates many kite-flying jobs. A labor force comparable to nuclear power (with its elaborate safety and security needs) is needed, of about one worker per two or three MW. Jobs are an urgent societal need, like clean energy, for a win-win dynamic. A golden age of sky sailing can be a bridge to eventual fusion or space-based solar power.
Low-tech arrays do not require waiting decades or spending billions for complex aerospace perfection. The FAA has just announced concern over AWE radar clutter, an issue with complex electric kiteplanes that the "rag and string only" school naturally avoids. The case is compelling for the US to support R&D of low-compexity hybrid kite energy arrays, just as the EU does. I am faced with emigrating to Southern Italy, otherwise ;)
Corwin Hardham.
We (Makani) believe the space of design topologies has been well explored, that rigid wings offer lowest cost of power, and that funding should focus on the enabling technologies and building blocks for long-lived commercial systems. This includes reliable servos, fatigue-resistant tethers, low-mass air-cooled motor
Suppose Makani's concept was adopted and the M1 class of airliner-sized kiteplane was to power a large city of 1-5 gigwatts load. Nevermind aerospace veterans warning about runaway cost. Presume a 100% capacity factor, even if thats not reality. Makani would need roughly one to five thousand large aircraft each occupying about a half square mile of "no-go" space, for a sprawling land footprint of 500-2500 square miles. This many aircraft would make that city a host for aviation activity two to six times more intense than Heathrow, the world's current busiest airport. As things stand, one mud dauber wasp nesting in a pitot tube or any crank with a cheap Russin GPS jammer can bring an M1 down. How much public treasure should be spent to confirm reducto ad absurdum arguments?
Spending R&D money chasing better servos, tethers, and motors, beyond the billions already spent by the aerospace industry for these commodities, is not really a revolutionary AWE plan. Being forced to take thousands of dangerous whining kiteplanes offshore is no solution. The sea will deal with them like the Spanish Armada. Offshore O&M costs are about triple land costs. Designing for saline conditions is demanding and drives capital costs even higher. Mere seabird poop can ruin wing performance.
Its dubious that Makani has "well explored" "the space of design topologies" to then bet everything on the M1 approach. By contrast, none of the many EU teams have gone down this high-risk path. We need balanced AWE R&D that includes concepts for cheaper, more compact, safer, and more powerful AWE arrays.
Mark, thanks for the hint. The NRA text below comes from NASA ARMD, and it does look like a promising model for cooperative R&D. In fact ARMD looks like the exact federal agency needed to administer an AWE science-engineering program. There is even the essential NextGen connection.
Sadly DOE/ARPA-E does not seem to have the specific aerospace depth to allocate their vast resources in the most scientifically optimal way for AWE.
---------------- pasted text -----------------------------
Aeronautics research at NASA is organized under the Aeronautics Research Mission Directorate, or ARMD. Its five research programs and testing facility program work to improve our national air transportation system by developing "green aviation" solutions. We start at the fundamental level by asking the basic questions first—"How do we do this?" "What will happen if we do this?" "How do we measure this?" "What's a more environmentally friendly way to do this?"
Nearly every aircraft today has a NASA-supported technology on board that helps the vehicle fly more safely and efficiently.
With world-class federal, industry and academic partners, we are creating the Next Generation Air Transportation System, or NextGen. Our work will help find solutions for increasing the capacity, efficiency and flexibility of our national air space, and to help address substantial noise, emissions, efficiency, performance, and safety challenges.
The following is general information related to the NRA process.
- NRA solicitations are released by NASA Headquarters through the Web-based NASA Solicitation and Proposal Integrated Review and Evaluation System (NSPIRES).
- All NRA technical work is defined and managed at NASA centers by project teams within each of the four program areas (Airspace Systems, Aviation Safety, Fundamental Aeronautics, Aeronautics Test Programs). NRA awards originate from the centers.
- Competition for NRA awards is full and open.
- Participation is open to all categories of organizations, including educational institutions, industry and nonprofit organizations.
Dave Santos
The competing model for public R&D funding is to support open knowledge on a cooperative model. In the case of AWE, there are dozens of aerospace departments across the nation that would eagerly perform the required AWE science and engineering and share it with the world. An aerospace student can make a significant contribution to knolwedge with as little as a 500 dollar expense stipend. Billions of dollars of exisiting investment in university labs, professorships, student tuition, room and board, and so on, is leveraged by a few dollars applied to the direct science and engineering study. 150 million dollars is enough to fertilize the work of thousands of smart dedicated scholars.
I agree that it would be great to achieve significant university involvement in AWE (just as Deflt has embraced this topic). Supporting a broad spectrum of universities would ensure significant publications in open literature (as students and professors have to publish). For a govt agency such as NASA, the mechanism for getting funding to universities in this way is through a NASA Research Announcment (NRA). I would think that ARPA-E has a similar mechanism in place. If a consortium of AWE companies endorsed such a strategy, it may gain traction to be supported in the future. But such NRA's are typically in the range of $5 million. There is simply no way the govt is going to put vast resources in this area, when it is still considered so speculative.
How best to allocate public AWE R&D funds is not just a question of what ideas to support, but also who should get such funds. One school of thought is that government should primarily partner with private investment. We see this already in the form of ARPA-E putting up three million for Makani Power R&D, on top the the twenty million or so Google invested for its 30% or so equity share of the company. The US government is thus giving exclusive early support for a Google investment (as if Google needed it), but what is the societal benefit? There is no public equity share in Makani and the "stealth company" is allowed to maintain corporate secrecy in the conduct of its contract. Efforts at public accountability are rebuffed without comment by ARPA-E's legal office. There is no public AWE knowledge bonanza in this model, it tends more toward unfair business practice and monopoly on the part of powerful actors like Google.
The competing model for public R&D funding is to support open knowledge on a cooperative model. In the case of AWE, there are dozens of aerospace departments across the nation that would eagerly perform the required AWE science and engineering and share it with the world. An aerospace student can make a significant contribution to knolwedge with as little as a 500 dollar expense stipend. Billions of dollars of exisiting investment in university labs, professorships, student tuition, room and board, and so on, is leveraged by a few dollars applied to the direct science and engineering study. 150 million dollars is enough to fertilize the work of thousands of smart dedicated scholars.
The open-source AWE Community is a natural partner to Academia, with shared values of open knowledge for societal good. There are key foundations and NGOs to partner with on an open basis. Not all AWE private ventures insist on exclusive IP or insider government subsidies. These are also natural partners in a cooperative framwork, deserving of cooperative contract work. Open international cooperation is also a core value of all these communities.
The end result of a cooperative AWE R&D program would be an accelerated and enhanced commercial environment. For all the reasons cited, my recommendation is the cooperative R&D model be applied to public AWE funding.
I have been casting an eye over some of my earlier models from near ten years ago. One design assumed a "C" or arch shaped fiberglass wing on two fiberglass tethers, one from each tip. Fully in tension this closely approximates a thin wall pressure vessel capturing the wind, approaching the ideal limit in terms of minimum structure for a kite power system. I was assuming fiberglass instead of carbon fiber because of its lower cost for a given strength. In some designs, I assumed four synchronous generators directly coupled to variable pitch propellers for differential thrust control of steering and angle of attack, this then being cheaper than electronic speed control. With the cost of computation and sensors decreasing fast I assumed that control costs would eventually be small.
For a 10MW system, I calculated the LCOE for the machine only (not including installation/regulatory costs), to be under $0.01/kWhr. Verification of this simplified paper design and the calculated costs can almost be accomplished with a pencil and a napkin. System mass, excluding anchor, was under 5kg/kW (compared to ~150kg/kW for a conventional wind turbine), and it assumed low cost materials, VTOL launching and landing was assumed.
Of course this is a highly ideal example devoid of the multitude of additional costs and complexities that are incurred when a design meets the real world, however, a low cost approaching this for airborne wind power does not appear fundamentally impossible. If such a low cost electricity source did become available, it is not inconceivable that it would come to dominate world electricity production. The extent of the global wind resource, and the ability of cross wind power systems to operate at high capacity factors even in relatively low wind climates (making them applicable most everywhere), enable this.
I would hope that the above simplified example shows, in an easy-ish to follow way, why airborne wind power, and specifically crosswind power, is of such great interest. If the practical problems of siting, grid connection, regulation and control, can be economically solved, then crosswind power becomes very difficult for any other electricity source, renewable or not, to beat.
Now if only the R&D funding, and a method to effectively apply it at scale, can be found...
Damon Vander LindAre there similar safety mechanisms for soft kites?
Mario Milanese noted several years ago that multi-line kites are far less prone to breakaway. The advanced 3D lattices described below have this sort of redundancy throughout.
Kite Killers are another essential safety feature, cheap and simple, which work quite well. They are essential if kite retract winches get saturated unawares by rising wind. Soft kites have a funny tendency to prefer staying up.
Soft kites do not reach the high terminal velocities of kiteplanes, and this is itself a major safety factor (less impact inertia).
Systems that do not fly high voltages and massive objects like generators are safer. Setting wild fires is a concern with conducting tethers that touch down. Low complexity AWECS entirely avoid most such hazards.
Safety is a prime concern even with soft kites, as safety drives cost and acceptability of all aviation platforms.
Damon Vander Lind
Getting the power consuption down on the reel-in phase still seems like quite a challenge, as the tradeoff is between controllability and power.
KiteLab Ilwaco's varied crosswind power wings have a brief elastic recovery phase at the top of the loop or figure-of-eight or limit of lateral sweep. These are self-excited oscillations that fly themselves without active control. Of particular interest are the battened membrane wing-mills which KiteLab pioneered. These are proposed as potentially the highest power-to-weight and lowest cost of installed unit energy of any competitor.
Overall flight stabilty of these rigs is provided by a pilot-lifter kite. Both active and passive stability methods impose a power overhead, but its unclear which requires more at present. Classic pilot kite stability is cheaper by capital cost or O&M expenses, so its especially attractive for capital poor markets. Its also at a far higher TRL.
It would be of great interest if Makani actually did test all these ideas, to compare with KiteLab's experiments.
Pete Lynnis very wrong. Carbon fiber has around ten times the strength to weight ratio of common textile fabrics, and so a carbon fiber "kite" can be a tenth the weight of an
Peter, You missed that my quote did not reference carbon at all, and we are not talking about "common fabrics" compared to carbon, that would be unfair. Carbon fiber (non pre-preg) works well in thin-film sandwiches for high-end racing sails and even resists flogging. Graphene and nano tubes will also go both ways; membranes or rigid.
The main reasons large rigid wing structures end up heavier than equivalent power span loaded tensile wing structure is 1) A rigid wing's need to resist high compression loads. 2) The brittle failure mode of rigid wings requires a far larger safety factor to be built in. A membrane wing is fail-soft, rips are contained within load paths (and are low tech repairs). 3) 3D rigid wing suffers far more cubic-mass scaling-penalty than a quasi 2D membrane wing with a tensile load path network.
Note that KiteLab proposes hybrid structures of soft and rigid wing. The unit size of these wings in arrays can be rather small, as the available forces sum beyond any monolithic wing, but the Re number characteristic length can be kept usefully small.
Ask youself how heavy a 22kW rated parafoil weighs and compare with the Makani Wing 7 all up weight (300lbs with tether?). I do agree that if you can leave the actuation, avionics, and power electronics on the ground, the two kinds of wing match more closely. The deep performance concept seems to be how close to its strain limit we can work our structural material mass, and tensile structure is favored thereby.
Is this Peter (Sr.) or Pete (Jr) Lynn? Both first names have popped up in this thread and i would tailor my comments accordingly.
Rob CreightonI agree that fabric structures will probably never be scalable or economical for grid electric generation. Their chief advantage is in limited damage during crashes, both to the wing and people in the area. For Windlift's application in off-grid, remote generation fabric structures also offer advantages in ease of deployment and mobility. Carbon fiber wings and airborne turbines/generators are simply to dangerous to deploy if people are in the area.
I agree that for short-duration, off-grid applications there could be a niche for fabric kites, though I think those applications would also be well served by using rigid wings.
Getting the power consuption down on the reel-in phase still seems like quite a challenge, as the tradeoff is between controllability and power. If you make it reliable, the power suffers; if you make it efficient, a lull can make the canopy start flying backwards, reverses itself, or any other number of problems. Of course, in your case, the operator can simply go out and re-launch when this happens, and throw the kite in the trash and launch another if it encounters a large positive gust.
One of the less obvious benefits we've seen with rigid structures (especially those which are either passively stable, as we use, or have tight active control to maintain tension, as others have done) is that their ability to reject gusts is quite improved as angle of attack quickly readjusts to the increased or decreased wind. This lets you cut it closer to the margins on the reel-in phase, and get better overall performance, in addition to the more obvious benefits during the generation stroke.
I think carbon (or fiberglass, my other favorite material) wings can be relatively safe. Large fabric wings are still quite dangerous if they hit someone, though I agree they are more safe than rigid structures. I think the lines are quite dangerous in either case, and that an inflated wing, especially one large enough to generate significant power, can cause significant harm if it hits someone.
There are a number of safety measures that are useful for rigid wings. The obvious first step is to not fly above people. For small winched systems with short life expectancies, the leading edge can be built of some material such as EPP foam, making impacts less traumatic. If airborne controls are used, it's pretty easy to design and build systems, such as W7, which descend in a deep stall under the correct flap positions, significantly lowering impact speed and travel distance. We haven't used this feature in flight, so we can't speak yet to it's success.
We have focused on reliability, single-failure redundancy, and having systems which ensure that any downed wing remains within the flight radius, as the primary means of safe operation. Parachutes are another option, and units from BRS may be suitable closer to Cessna scale (in mass not span).
Are there similar safety mechanisms for soft kites? I remember we employed an 'emergency release' at some point for our soft kites. It released at a set altitude, probably around 15 meters, giving the soft wing time to decelerate before it hit the ground. This saved quite a few kites for us. Simply spooling out a large chunk of line helps if line handling goes well, but could be dangerous if there is a problem with line handling on the winch (eg, excess reeled-out line getting stuck on the winch)
Dave SantosCorwin, your performance figures of rigid wing versus soft wing by area are reasonable, but soft wings clearly win by weight-to-power, a more pertinent flight metric
No, this is very wrong. Carbon fiber has around ten times the strength to weight ratio of common textile fabrics, and so a carbon fiber "kite" can be a tenth the weight of an equivalently powerful textile kite. Textile fabrics are also not necessarily less expensive than carbon fiber on a per kilogram basis, let alone a per kilowatt basis. This is but one reason of many why textile fabric kites tend to be a bad idea for kite power generation. There are some niches where textile fabric kites can perhaps make economic sense, but large grid scale power generation is not one of them.
Corwin HardhamWe never measured a wing performance within a factor of 3 of the performance I describe here.
Corwin, your performance figures of rigid wing versus soft wing by area are reasonable, but soft wings clearly win by weight-to-power, a more pertinent flight metric. For example, you know that a traction kite equivalent in power to your Wing 7 is about one tenth the gross weight. Soft wing capital cost is about 1/50th by power rating, with a currently greater "survival life".
This leads to the most important economic dimension: ROI. Does the Makani economic model include all the costs of complex aircraft that Fort Felker and other aerospace veterans warn of? Higher hull-insurance and liability insurance, relentless safety-critical inspections and maintenence by skilled technicians, high cost of replacement parts like flight-rated servos, power electronics, and so on? Until a realistic economic model or proof of superior ROI is shown for high-complexity kiteplanes, we have to support balanced R&D that includes soft kites.
Note that the best parafoil soft wings with an L/D > 10 do well crosswind with a "short-stroke" pumping mode with elastic return. The long-reeling prototypes you cite are obsolete baseline research designs. A looping soft-wing under a pilot-lifter kite (a hybrid) does not have the sudden crash mode of hot aerobatic kiteplanes. As the wind dies the tuned looping wing naturally stops and lands slowly. If the looping wing tries to surge into the ground, the pilot-lifter acts with progressive force to prevent "thumping". Rigid wings are hardly immune to non-linear hazards, they have their own unique vulnerabilites. One whack with a hammer can ruin them.
Another high-risk Makani approach is total dependence on active fight automation. Clever use of kite passive-stability methods does the job as embodied field-computing. Classic kite autonomy is a sound foundational cybernetics to build active control upon. Makani's design philosophy in rejecting these inherent stabilities is another subject for comparative testing and third-party validation. We should all support a definitive validation process for every claim.
Endurance of materials is only one of the reasons why we moved away from fabric structures. While there is good anecdotal evidence that fabric structures can last, the peer-reviewed, published data on rigid structures provides a much more reliable framework to make estimates of life.
Nonetheless, the main reasons why we moved away from fabric structures are: controllability (repeatability), safety and performance. A few qualitative remarks on controllability and safety: 1) We found curvature control on textile wings was highly sensitive to windspeed and generally completely uncorrelated to control input, and 2) textile wings operating in crosswind flight demonstrate survivability on impact similar to rigid structures. These observations stem from many hours of flying in a large range of wind speeds from 2-25 m/s. Making power requires speed and repeatability in control which are two things that rigid structures provide to great extent.
In terms of performance, the estimate of wing size required for the MW system that I listed earlier was highly optimistic in favor of textile wings. The estimate was based on doubling the measured drag of Wing 7 which is a highly evolved and clean airframe. In 2008, we tested every textile wing that we could find (kitesurfing kites from nearly every manufacturer; custom kites from Pete Lynn, Don Montague and myself; and bridled ram air kites). We never measured a wing performance within a factor of 3 of the performance I describe here. Hence, the 533 m2 is likely a gross underestimate of the scale needed.
I recognize that other groups have claimed to have reached better performance with textile wings. To this, I would welcome a chance to see the power over the full winch out/in stroke. We were able to easily show very favorable power peaks on the reel-out stroke, but the time and power required reeling back to the same point did not make favorable average power. Our results were with fully active angle of attack control, fully autonomous (adaptive power tracking) flight control and a brushless winch drive with a high quality gear box.
A list of wing performances:
Zeta = [power generated]/ (0.5*[air density]*[ambient wind speed]^3*[area of wing])
Wing
Modern wind turbine: Zeta = 5.5
Wing 7: Zeta = 8
Wing 4: Zeta = 5-6
Wing 3: Zeta = 3-4
Best textile wing at Makani: Zeta = 1-2
Open source AWE circles have opened up a revolutionary new way of looking at giant freespace airborne and undersea structure as a new class of engineered "megamaterial". 3D latticework made of wings and strings acts as a saturated gel when pressurized by flow; a novel flying aerogel of record low density and unique capabilities.
Bulk liquid crystal properties emerge and the vast framework is harmonically excitable into its normal modes. These internal waves can be harvested at the surface for energy, or such waves reversed-pumped to maintain the latticework aloft. The vibratons can be crosswind modes for efficient energy harvest, or phased spiral waves for persistent flight. Putting lift surfaces all along a lattice solves single unit altitude limitations. This is a potent geoengineering technology.
We have a mature kite superfiber in UHMWPE, itself a liquid crystal. The quantum mechanical mode of power transfer along the quasi 1D lines is "ballistic conductance", a common yet still conceptually exotic mode of high-speed thermodynamic transmission. The efficiencies are astounding, approaching superfluidic and electron superconducting modes; performance far beyond ordinary electrical conducters, especially by weight and aerodrag.
A "radial engine" wire-rope cableway layout at the surface can take phased tugs from above and concentrate them at centerpoint generators of the largest economy-of-scale (~700MW). This avoids a massive carousel structure overcrowded with kites, which had been a major gigawatt concept contender. Its also possible to lay down or raise flying megastructure along well defined corridors or furl them suspended from terrain or towers, keeping most of land area free for other uses. Estimated airspace and land utilization is far denser and more efficient than single line kitefarm sprawl can ever be.
Airborne megastructure is the ultimate aviation platform to host endless applications and even someday fly over cities. Early "toy" experiments with classic kite elements easily span a kilometer by one half kilometer high. A small test program allocation can advance this most-distruptive set of AWE methods at extremely impressive scales.
Corwin Hardhamthese systems. A 1 MW device of the current Makani design has a span of about 35 meters and area of 53 square meters, while that of a 1 MW soft kite with rather optimistic performance estimates has a span of 73 meters and an area of 533 square meters. Given the ungainly size and ground handling of a 73 meter span fabric kite, and the inability of such a kite to handle high winds, no winds, wind reversals, and so on, Makani chose to
Several teams adopted classic low-complexity solutions to problems Makani had with soft kites. SkySails of Germany has already gone to market with megawatt class soft kites in the ocean shipping application as Makani's latest prototype barely yields the power of a high-end lawn mower (22kW). SkySails automated aunching and landing is done from from a pole just large enougn to keep the kite clear of the deck (an ancient method). In high winds the kite stops sweeping to reduce power. In storm winds or calm the kite is brought in. "Wind reversals" (turbulence) affect all kites, and it has not been shown that rigid-winged kiteplanes like Makani's survive better over time. Soft kites tend to survive crashes and composite airframes do not.
Makani has not explained how they solved the need for frequent inspection of all critical flight components that regulated aviation airworthiness requires. They have been silent about public safety concerns most affecting jumbo autonomous aerobatic E-VTOL kiteplanes, declining to openly report safety-critical failure-mode knowledge, in violation of aviation cultural norms. A high-voltage flight-rated tether is itself a major concern. Can they really show that E-VTOL at thermal limits provides adequate safety margins? Hundreds of such questions need to be settled by third-party validation testing.
KiteLab Ilwaco has publicly shown that a membrane winged kites, singlely and in arrays, can be towed in circles in calm, as well as launched and landed, by phased tugs of radial tethers from (industrial grade) ground winches. The aggregation of many soft kites and rigid power wings into vast utility-scale arrays allows a divide-and-conquer strategy. Hot-swapping and a robust multi-path sequencing of array states allow for all conditions. High L/D rigid wings looping crosswind can be hosted in large arrays in large numbers, held passively clear of the surface. The entire array can be flown as one control process to multi-gigawatt scale. All generation and actuation of large arrays can be kept on the ground. These are options Makani never explored.
Douglas AmickTo me it is all about hardware. Once you have a prototype that performs flawlessly, all of the political and societal issues will fall into place. So I would budget the biggest portion on the prototyping amd hardware engineering. Often after embarking on a development mission, you discover along the way better ways of doing things. So I would put 70% into the enginnering process.
The problems are not really political or societal - they are regulatory, effective land use, engineering, financial, etc. One of the things that has bothered me is that many in the AWE community have simply stated - "as soon as we build a machine, congress will change the airspace laws to permit us to use them". This is not the case at all. While Part 77 will provide a mechanism (with restrictions) to use them to 2000 ft - that's the best that will happen. And there will be many burdens (lightening, redundancy, etc) that will be in the requirements. So there really are not political or societal issues present. There is a incredible lack of public understanding present that inhibits this sector, but that is an educational outreach issue. Fundamentally the key inhibitor is establishing the credibility that permits more funding to flow to private efforts in this emergent industry.
Damon Vander LindAn interesting point which is often missed in discussing fabric structures. The fatigue allowables for dry fiber systems such as fabric kites are generally much lower than those for composites or metals. The fibers wear on each other and slowly cut through each other, or abraid away polymer chains (or creep, or degrade in UV light). This leads to a large increase in system mass and cost as one attempts to go from a prototype to a system which can last many years without much human interference.
The problem with rigid airframes like Makani's is that flight automation is not mature enough to ensure the expensive composite structure survives to pay-back; about five years. Meanwhile cheap fabric wings in large arrays that survive mishaps have a decade or so market window of superior lifespan. 10000hr service life of the best kite polyester is now suggested by documented experience and 12 yrs life of fabric on legacy aircraft continuously exposed to weather is not unusual (low tech alu paint). Fabric wing payback can be as little as three months service.
Creep is actually a virtue of liquid crystals like UHMWPE. They reach their prime, in terms of strength-to-drag, after a few years under load. Its easy to retune lines every couple of years to account for creep, The skeletal loadpath structure of vast soft arrays will be thick enough to endure decades fully UV protected within fatigue limits.
Rigid wing structure at larger scales, especially. burdened with generators and avionics (Makani's concept) most acutely "leads to a large increase in system mass" (mass to power) and "much human interference" for skilled inspection and maintenence. Fabric wing construction can be automated in high-speed production from roll-stock. Compostite airframes are craft-built.
Damon Vander LindAn interesting point which is often missed in discussing fabric structures. The fatigue allowables for dry fiber systems such as fabric kites are generally much lower than those for composites or metals. The fibers wear on each other and slowly cut through each other, or abraid away polymer chains (or creep, or degrade in UV light). This leads to a large increase in system mass and cost as one attempts to go from a prototype to a system which can last many years without much human interference.
The "Technik Museum" in Berlin curently shows an exposition on the history of wind energy. One can find there the remains of a small wind mill with wings made from 180 gsm Dacron 20 years ago. Several of the so called IPAT wind mills were runnning in Africa at high tip speed ratios for about 7 - 10 years or more. The fabric blades of the shown example are still OK, but the wodden wing structure failed at the hub.
Steve DavisHow would you allocate R&D funds among the three markets Bormann defined, from small to large? (e.g., 33% / 33% / 34%)
This allocation is not representing my perspective, but the insufficient action of myself and the safari browser when entering the discussion. ...
I agree that fabric structures will probably never be scalable or economical for grid electric generation. Their chief advantage is in limited damage during crashes, both to the wing and people in the area. For Windlift's application in off-grid, remote generation fabric structures also offer advantages in ease of deployment and mobility. Carbon fiber wings and airborne turbines/generators are simply to dangerous to deploy if people are in the area.
Diesel generators have a LCOE of about 1/8th the fully burdened cost of a gallon of fuel. This fuel cost can be anywhere from $4.75 per gallon for mobile phone base stations, to $15 per gallon for military generators. At $0.50 per kWh you can afford to replace the fabric wing and the worn section of the tether every 4-6 months for systems in the 10 kW range, operating at 25% capacity factors.
For grid-scale applications at $0.02-0.04 per kWh I am convinced that the Makani and Ampyx approaches have the greatest probablity of success, especially off-shore, where carbon fiber wings could potentially survive unscheduled landings without catastrophic damage.
An interesting point which is often missed in discussing fabric structures. The fatigue allowables for dry fiber systems such as fabric kites are generally much lower than those for composites or metals. The fibers wear on each other and slowly cut through each other, or abraid away polymer chains (or creep, or degrade in UV light). This leads to a large increase in system mass and cost as one attempts to go from a prototype to a system which can last many years without much human interference.
Carbon and fiberglass, on the other hand, are great. Carbon has very low degradation under varying loads, often keeping above 70% strength at 1E6, R=0.1, depending upon material and manufacture specifics. Fiberglass is the same, but heavier, cheaper, and slightly faster to degrade. The biggest downside with either of these is probably their ability to sustain damage from impacts--birds, hail, and other non-newtonian elements to the fluid. They build wind turbines and aircraft out of the stuff for a reason.
I think current materials are sufficient to vastly out-perform conventional wind and, perhaps not even including externalities, coal. The problem is just one of good design, good engineering, and rigorous testing. New materials may improve system performance, but anything more groundbreaking than incremental improvements to carbon, aramids, and uhmwpe are probably decades out. The potential inpetus from AWTs for materials scientists would be merely a drop in the bucket compared to the impetus from existing industries that would use these materials.
Current technology is sufficient in the realm of motors, power switching, structures, aerodynamics, sensing, and control, so I advocate a focus on designing and testing (at component and system level) AWT specific hardware.
Pete LynnI would also make the point that we specifically do not want an Apollo type program. While the Apollo program was a great success in helping to win the cold war, it was completely economically unsustainable (it got cancelled for good reason), and resulted in poisoning the space technological culture and funding well for more than a generation. Many would argue that space technology would currently be far further ahead, and far more affordable, if Apollo had never existed. It is important that airborne wind power does not follow that developmental model, but follows a more government assisted organic development model instead - as used for heavier than air flight, the internet, and so forth. Like space, airborne wind power is an economic problem, not a technological problem, the solution lies in good, economically competent engineering.
I agree, but perhaps more importantly, an Apollo scale program doesn't make sense until the goal and method are both well defined. In this case, development is not yet far enough along to justify a budget large enough to cover widespread deployment. For now, the most judicious use of funds may be to give promising companies not having fully functional prototypes enough money to complete and test fully functional prototypes, and to give those having fully functional prototypes budget to pursue utility scale prototypes. This would probably require a budget in the tens of millions rather than billions.
Steve DavisDoes anyone dispute this niche or think buoyant systems can compete with dynamic airborne systems in the longer term?
I disagree that any balloon based system will be very effective. Balloon technology might be nice for transportation (untethered).
Steve DavisDoes anyone dispute this niche or think buoyant systems can compete with dynamic airborne systems in the longer term?
Rob CreightonFor purposes of this discussion I categorized "balloon" as any fabric based Leading Edge Inflatable or Ram-Air wing. "Lighter-than-air" systems have poor lift/drag characteristics, and will prove incapable of generating power economically.
Fabric
I'm not really disagreeing, but this is not the characterization elsewhere on this forum. Most people are characterising fixed wing as a an airfoil that flies crosswind, including fabric, pressurized or ram-air. Just saying better to remain consisten.
Martin HoffertSaul focusses on near term commercial AWG. I'm looking for innovative breakthroughs achievable with R & D of the type ARPA-E was created to support that could enable AWE power at multi-terawatt levels to phase out CO2 emissions to near zero worldwide. We need both.
No, i'm focussed on both in statement of tether length. Refer to Pete Lynn's comment about tether cost. You can go higher but the energy won't get cheaper. Incidentally more valuable to focus on tether drag minimization than tether strength or length. I was looking at the most scalable utility technology in all of my statements herein. I think it is not useful to say "near" or "far" term. There are not unknowns, just work to do.
My selections are roughly the same and for the same reasons as Corwin's selections.
To me it is all about hardware. Once you have a prototype that performs flawlessly, all of the political and societal issues will fall into place. So I would budget the biggest portion on the prototyping amd hardware engineering. Often after embarking on a development mission, you discover along the way better ways of doing things. So I would put 70% into the enginnering process.
Over the past five years, Makani has analyzed or prototyped nearly every major tethered airborne wind energy generation architecture. We have a sophisticated modeling environment that has been shown to be well correlated to measured flight data. The first and most fundamental result of modeling and analysis is that stationary systems, outside of the jet stream, offer only marginal improvements over terrestrial turbines. Crosswind systems--those in which the system flies at a significant multiple of windspeed across the sky--interact with a much larger body of air, and offer large improvements in performance over terrestrial turbines. Within the category of crosswind systems, the first question is whether the system should be of traditional aerospace materials, or if it should be of traditional kite materials. The decision to pursue aerospace materials and rigid wings followed from the significantly greater performance possible with these systems. A 1 MW device of the current Makani design has a span of about 35 meters and area of 53 square meters, while that of a 1 MW soft kite with rather optimistic performance estimates has a span of 73 meters and an area of 533 square meters. Given the ungainly size and ground handling of a 73 meter span fabric kite, and the inability of such a kite to handle high winds, no winds, wind reversals, and so on, Makani chose to pursue rigid wings. Furthermore, fabric wings are unlikely to be able to withstand fatigue loads imposed upon all non-stratospheric wind generators, while rigid wings may be built of aerospace metals and composites which have been well proven to last through high-cycle fatigue for decades of operation in aircraft and wind turbines.
Within the category of crosswind rigid wing systems, the primary choice is between airborne and terrestrial generation. The primary reasons for Makani's choice to pursue airborne generation are:
- Controllability/Safety: With minimal delay, onboard rotors can apply thrust to prevent stall, and aside from launching and landing, there is only one mode of operation (flying circles)simplifying control.
- Clear launch landing strategy: the thrust to weight ratio of our systems are typically >2 even at large scale. This enables us to undertake launching and landing in a wide range of conditions.
- Continuous power generation: if needed, we can maintain <1% variation in output.
High-speed, direct-drive generation: small, direct drive generators with relatively small amounts of permanent magnet material. In winched systems, either a high gear ratio gearbox or a very advanced and large diameter direct drive generator must be used.
- Low Wear: Winch systems have a moving point of contact. and must carry rope over a sheave and drum at all times. This increases wear and reduces system life.
- Lower Capital-Cost: at utility scale, the high cost of the winch drives plant capital costs.
This leads to our conclusions to follow our current architecture of rigid wings with onboard generation. This architecture decision has been further informed by the the construction and testing of a winch based fabric wing system, resulting in multiple consecutive fully-autonomous 30+ hour flights with positive power generation, prior to construction and testing of the current W7 prototype. Other efforts, such as Ampyx, are pursuing winch based systems. If such systems are able to adequately handle the ramifications of winch cost and tether wear at large scale, as well as the problems of launch and land on such systems, they may offer another potential cost-competitive solution.
We believe the space of design topologies has been well explored, that rigid wings offer lowest cost of power, and that funding should focus on the enabling technologies and building blocks for long-lived commercial systems. This includes reliable servos, fatigue-resistant tethers, low-mass air-cooled motor/generators, high voltage conversion systems, and airfoils optimized for airborne wind power.
Pete LynnI would tend to favor the fail small, early, and often approach to R&D
Fail fast, fail cheap, fail often. That philosophy allowed us to move from kites, to rigid wings, to autogyros over eighteen months while building (and crashing) 59 unique designs to arrive at what we believe is an AWE system design that will be economically viable for our chosen market.
Lorenzo FagianoUnfortunately, I do not think that small-scale AWE will be commercially viable, except for a niche, because one would have to reserve a no fly zone and significant safety area already for a single unit operating between 200 and 800 m above the ground, so if the generated power is too small it probably would not be worth the effort. This is different from what happens with small wind turbines, and it is an obstacle for AWE development, since one has to directly aim to the large scale market, with consequent larger investment and longer development time
While this statement may be true for Europe, (though still debateable), it is defintely not true for the US and likely most of the rest of the world will lower population densities. (Most of US is uninhabited.) Our market research studies show more than 100,000 economically large farms in the US with more than 400 acres of land (a little more than a square km), allowing flight at heights above 1200 feet AGL. A phone survey we made of more than forty of those farmers in the seven US states with the highest electricity prices and adequate winds showed us that the vast majority of them (95%) were willing to pay as much as US$150k for an AWE system that would provide them with approximately 30kW of power 75% of the year (providing about half of their annual electricity needs) and also providing a minimum ROI, including estimated M+O costs, of less than seven years in each of those states. Consequently, those are our design goals at Highest Wind. Regarding no-fly zones in the US, , , the FAA is moving in that direction. It's likely to be a reality in another five years. As for other countries, I believe no-fly zones will be much easier to define in the developing world with very few private pilots and essentially no aircraft flying below 3,000 AGL. I have no data for, nor interest in selling within Europe.
I was approached by the US Army "Rapid Equipping Force" in 2009 about using our tethered glider design as a much-lower cost replacement for Aerostats (helium baloons) being used as persistent observation platforms carrying about 150 pounds of surveillance gear. They told me that each aerostat system costs well more than a million (for the baloon alone), requires a 53 foot trailer as the ground support vehicle, can fly no higher than 5,000 ASL, can fly in winds no higher than 25mph, requires an eight man ground support crew to launch and land, and uses hundreds of thousands of dollars worth of helium every year to stay aloft. While LTA AWE is easy to understand and easy to get operating, clearly it will never provide an ROI acceptable to any potential customer.
I believe Autogyro ground-gen AWE systems will be extremely cost effective at providing continuous power levels below 100kW but don't want to even start messing with the forces involved to produce more energy than that. Fortunately, the markets for that size AWE system are well more than adequate to keep me busy for the next few decades. The inherent flight stability of autogyros greatly reduces the frequency of use of servos for control surfaces which I believe will extend the operational lifetime of those servos to keep overall M+O costs to a level allowing a competitive ROI. I also believe current aerospace and tether materials are more than adequate for the job.
However, I don't foresee ground-gen systems of any kind being able to produce power levels of more than a few hundred kW. The forces on the tether and the pull on the ground station will simply be too great to build an economically viable system. M+O costs will overwhelm the production of energy. For that reason, I would support research into fly-gen systems of multiple types, other than LTA systems. That said, I know fly-gen systems have a MUCH longer road to economic feasibility and will require considerably more investment than ground-gen systems.
Martin HoffertHIGH ALTITUDE WINDS. Calculations based on atmospheric circulation statistics and models by Ken Caldeira and Christina Archer show persistent high-altitude winds with power densities of > 20 kW/m^2 available 5-10 km above the surface -- over ten times the intensity those near the surface which some argue a nascent AWG industry should focus. This isn't a bad business plan for starters. But it's unlikely to put a serious dent in global CO2 emissions by midcentury any more than surface-only windpower.
I think the quality of the energy resource at very high altitude is not in dispute. However the gains in power are heighest per meter climbed in altitude up to 500-600m depending on terrain, After that you have to climb very high for much less reward. More practically, in my understanding there are a number of issues that make this resource difficult to access, principally relating to the tether:
1) The circular sections of tethers on current test systems impose an enormous ammount of drag. By increasing the length of the tether by say 20 times compared to a system operating at 500m you will be reducing the L/D of the system as a whole. From fairly detailed workthroughs I have seen, it appears that even systems at 500m will likely need tether fairing to reach an acceptible full system L/D, at least at the top of the cable for a crosswind flying wing. Fairings are an irritating extra financial cost and operational pain -flutter, icing , winch handling etc. As an aside, this is also an argument for MW vs kW scale AWE as the load capacity of the tether will increase exponentially with the tether x-section.
2) All that cable will be heavy and will impair your performance in lower winds - witness the high cut-in speed for SkywindPower proposed designs. There is a safety concern/energy cost for very long tethers which will need to be prevented from touching the ground when sagging as the flying system will be at some downwind angle .
Having said that, it is not inconcievable that tethers using nanotube yarns will become availble within the next decade or two. This would completely change the altitude profile. Exotic laser/em power transmisison technologies could also be an enabler but from the little I have read, weight is going to be an issue there for the forseeable future.
Saul Griffithlow loss ?
LASER POWER BEAMING TO THE SURFACE. Saul's correctly observes that both the parasitic drag and weight of tethers may be increasingly problematical as altitude increases to where wind power peaks. (Most tethered balloons operate at altitudes < 1 km). So we want to keep the cross sectional area as small as possible consistent with the tensile forces. Tethers of Kevlar 49 appear to have the highest tensile strength per unit mass commercially available.
There is however hope for a breakthrough here. Below is an Excel table I just made from data in Edwards, B. (2002) The Space Elevator (Spageo, San Francisco) showing, for various tether materials, the density, tensile strength and self-support length; that is, the height a cable composed of this material can be suspended from in a gravitational field equal to Earth's surface gravity (1 g) before breaking, proportional to the material's strength-to-weight ratio. Although this doesn't directly concern us for tethered AWGs in the upper troposphere, when one takes the variation of gravity with altitude, the equivalent 1 g self-support needed to suspend an untapered cables from geostationary orbit 36,000 kilometers is only ~ 5,000 km, which is why the space elevator community has been enthused about cables woven from single walled carbon nanotubes (SWNTs).
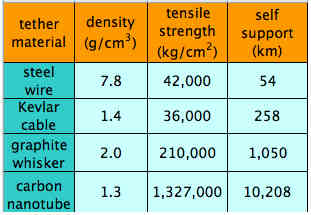
Indeed, very high strength to weight has been shown for milimeter-long SWNT molecules in the lab. There's a way to go before we have space elevators tethers but maybe not flying autogyro tethers. We don't need SWNT for initial tests high-altitude AWE. Kevlar may be good enough for this application but we have to of course test it. More serious is that Kevlar isn't a good conductor for transmitting the power to Earth (even a good electrical conductors with small cross sectional areas we're shooting for might have unacceptable resistivity power losses).
Which brings me to diode laser power beaming to solar PV farms from AWGE and their transmission efficiency, about which there is a lot to say. I've already said a lot and am just getting started. So let me just put this teaser in: Laser power beaming has been looked at by the Space-Based Solar Power community as well as the Space Elevator community; in the latter case, as a power source for "climbers" during the construction phase of a Space Elevator; and fairly recently (November, 2009) in the Space Elevator Power Beaming Challenge Games at NASA Dryden Flight Research Center on Edwards Air Force Base in California's Mojave desert (see figure).

In these "games," Laser Motive won a $900,000 X-like prize from the Spaceward Foundation for fielding a ground-laser powered robot climbing a kilometer-long cable suspended by helicopter in 3 minutes and 48 seconds. (I know some may wonder how so many smart people have been induced to look at a "crazy idea" like space elevators, but after all, look at us.)
The payload mass was 5 kilograms and laser power transmission level 200 watts received by a PV array onboard the climber. This is well-documented. If we can beam power up wirelessly, we can beam it down. There is much more to say technically, and to research, about this idea, the efficiency of near-infrared laser transmitters, beam safety, the efficiency of receivers, and systems considerations. But the point I want to stress to the AWE community is that this is a big idea maybe getting us to the sustainable terawatt power level of emission-free electricity, not all that far from the leading edge of what we know how to do, though it is certainly a stretch.
Saul GriffithPeople who believe in altitudes beyond 10000 ft probably haven't sufficiently modelled tether drag and tether mass in their systems, nor the statistics of high altitude wind speeds.
Saul focusses on near term commercial AWG. I'm looking for innovative breakthroughs achievable with R & D of the type ARPA-E was created to support that could enable AWE power at multi-terawatt levels to phase out CO2 emissions to near zero worldwide. We need both. But we need also to understand whether we already have the tech to transition from fossil fuels within existing markets and venture capital, perhaps augmented by federal loan guarantees (Solyndra, etc.), or whether we need targeted Apollo-like research and demonstration programs in the R & D funding "valley of death" to hit home runs.
HIGH ALTITUDE WINDS. Calculations based on atmospheric circulation statistics and models by Ken Caldeira and Christina Archer show persistent high-altitude winds with power densities of > 20 kW/m^2 available 5-10 km above the surface -- over ten times the intensity those near the surface which some argue a nascent AWG industry should focus. This isn't a bad business plan for starters. But it's unlikely to put a serious dent in global CO2 emissions by midcentury any more than surface-only windpower.
We don't need the detailed atmospheric physics and climate science now, but the bottom line is that multi-terawatts are available in concentrated jet streams in the upper troposphere; and in my opinion any visionary multi-terawatt carbon-neutral electric power program should at least try to harvest this power, also assessing whether circulation change feedback from such massive diversion of high-altitude wind power to electric power on earth is worrisome. At this point, I think not. Total kinetic energy in atmospheric winds generated by unequal solar heating of Earth's rapidly spinning atmosphere, some 0.5% of solar flux incident on the planet, is dissipated to heat by turbulence anyway, albeit in different places than it would be if flying generators don't tap it. ("Big whirls have little whirls that feed on their velocity; little whirls have lesser whirls and so on to viscosity" -- Lewis Fry Richardson). But I could be wrong & we have to study this. David Keith has started to look at wind power feedback on climate, but not for high-altitude flying wind generators.
For MW scale systems, balloons are a distraction as will never be competitive.
Auto-gyros are interesting, however potentially unnecessarily complex given demanding operational environment.
Lions share therefore to fixed wing.
For addressing uncertainties, data on performance and reliability needs addressing. Hardware is expensive therefore takes the majority, controls/software/ integration all important due to requirement for autonomy.
Materials science - industrial products available to meet most requirements already. These will only improve and availability will converge with MW AWE. Some funds neccesary for manufacturing/construction technique development however.
Uncertainties:
Can it be done? Autonomous flight 24/7/365?
Component reliability for flygen systems an issue
Materials reliability and durability for yoyo systems an issue?
Can it be done cost effectively?
-What will system costs be?
-What will o&m costs be?
-Reliability is unknown and will not be fantastic initially
-Financing for new tech at large scale for capital equipment that has to run 20 years?
-Long term testing will be necessary to address above two issues.
Pete LynnI advocate initially operating airborne wind power systems off existing wind turbine towers is
1. AWE is generally aiming for a world of WECS that do not need those extant conventional towers. I would not want first impressions be with those towers tightly connected with AWE.
2. Certifying those extant towers for the forces that a kite system could bring would be a project in itself. Negotiation with owners of the towers, the insurance adjusters, and a repeat negotiation with the neighbors are challenges unneed for initial AWE operations.
3. Getting a non-towered successful AWECS going might win more PR than one appearing as needing the status-quo wind-industry tower.
Pete LynnI advocate initially operating airborne wind power systems off existing wind turbine towers
This was a topic pondered on the online AWE Forum. There are a few disadvantages to consider. In turbulent wind, especially with hot kiteplanes, the aircraft can overfly and foul the existing turbine rotor just up wind. Launching and landing behind conventional rotor turning entails parking the rotor or a turbulent wake for the kite to negociate. Generally lift will suffer at the crucial docking point by a combination of wind shadow and wake turbulence.
Tower access is not easy, usually by hand climbing or crane, and knee damage is the number-one occupational health complaint of windtower workers. If a kite system is to completely replace the old tower rotor, the high capital cost of the tower is built-in, not avoided. Pulling hard at the top of a tower cost more in terms of structure than pulling against a cheap ground anchor. Wind tower spacing will be a severe kite altitude limiting factor, The general rule with kites is that if they can foul, they eventually will, so each kite needs scope fully clear of neighboring kites.
Still, this idea should be well tested along with many others. Launching from poles, masts, and towers is a worthy ancient trick, with SkySails as the best modern example
Lorenzo FagianoI agree in that the R&D should start on a small scale, but I believe that the goal should be for a medium-to-large scale systems, already from the beginning. I allocated 70% R&D funds to large scale with this scheme in mind. Indeed in the development of a 1 or 2-MW AWE system, one would first realize smaller systems (as it has been already done and is still being done), so eventually small-scale products can come out from this process, however I believe that the final goal of R&D should be the large scale.
My concern is the need to have hundreds of systems working for many years in real world situations so as to build the market credibility necessary for large financial institutions to committ to hundred million dollar multi-year installation projects with ten year payback periods. Waiting to demonstrate that with full megawatt plus scale prototypes is likely to add significantly greater risk and a few more years to the commercial scaling up process.
Lets keep in mind that the general physics of wings on tethers to make energy applies to tapping ocean currents, a geoflow resource comparable to airborne wind in scale. Underwater kites are called paravanes, and many power engineering issues map across the air and sea domains. In many places the ocean current resourse will be far better. Folks tend to underestimate the greater challenges and costs of operating anything at sea, especially complex aircraft, avionics, and power electronics in a saline environment. Once again the hybrid class is hot, with airfoils mechanically opposed to hydrofoils as a promising configuration. In the general sea cases, surface based generators and actuation are favored to tap power from wings above or below the surface.
Pete LynnHence I would tend to advocate designs that can be developed and commercialized at relatively small scale, which are good enough to be commercially viable at small scale, but which are fundamentally able to be scaled to larger ten megawatt plus sizes when the development and market allows. For large complex problems like airborne wind energy, it is necessary to design an economically sustainable design path that evolves with the technology and the market, it is important not to get distracted by a one off "optimal" design. Point being, the development of a terawatt scale airborne wind energy industry does not start with the design of a many megawatt system, but with the development and commercialization of many smaller systems - the establishment of a small scale airborne wind energy ecosystem, a seed from which to grow something bigger. And so near term "optimal" airborne wind energy designs are ones that can initially survive and thrive in such a small scale ecosystem.
I agree in that the R&D should start on a small scale, but I believe that the goal should be for a medium-to-large scale systems, already from the beginning. I allocated 70% R&D funds to large scale with this scheme in mind. Indeed in the development of a 1 or 2-MW AWE system, one would first realize smaller systems (as it has been already done and is still being done), so eventually small-scale products can come out from this process, however I believe that the final goal of R&D should be the large scale.
Unfortunately, I do not think that small-scale AWE will be commercially viable, except for a niche, because one would have to reserve a no fly zone and significant safety area already for a single unit operating between 200 and 800 m above the ground, so if the generated power is too small it probably would not be worth the effort. This is different from what happens with small wind turbines, and it is an obstacle for AWE development, since one has to directly aim to the large scale market, with consequent larger investment and longer development time
Pete LynnI would tend to favor the fail small, early, and often approach to R&D
Exactly, we must relentlessly test every idea at small scales first, and only scale with confidence. But its also our job to identify early the big ideas that may blossom in good time. If we can comparatively test all contending ideas at small scale (1/32-1/4 scale proposed) it serves both the needs of the small-scale early markets, and the critical-path to utility-scale.
KULeuven and KiteLab Group are two teams explicitly passionate about small-scale AWE R&D, but here is also great instructve value in seeing Makani Power attempt its "707 scale" Autonomous Aerobatic E-VTOL Composite aircraft by 2016.
BTW, is this Pete Lynn or Peter Lynn? Both father and son are top notch!
I would tend to favor the fail small, early, and often approach to R&D in this case. Evolution tends to work faster at smaller scale and the design and construction details do not yet seem sufficiently evolved to enable the sensible development of a 747 class kite power system - which might presumably take a decade and a billion dollars or more only to fail badly. I might also note that conventional wind turbines were intially developed at quite small scale, and then gradually they evolved to ever larger sizes.
Hence I would tend to advocate designs that can be developed and commercialized at relatively small scale, which are good enough to be commercially viable at small scale, but which are fundamentally able to be scaled to larger ten megawatt plus sizes when the development and market allows. For large complex problems like airborne wind energy, it is necessary to design an economically sustainable design path that evolves with the technology and the market, it is important not to get distracted by a one off "optimal" design. Point being, the development of a terawatt scale airborne wind energy industry does not start with the design of a many megawatt system, but with the development and commercialization of many smaller systems - the establishment of a small scale airborne wind energy ecosystem, a seed from which to grow something bigger. And so near term "optimal" airborne wind energy designs are ones that can initially survive and thrive in such a small scale ecosystem.
Joe FaustMegaKite systems on land could drive ground cable to turn legacy generators.
This is one of the most powerful concepts to emerge in the AWE creative commons, that existing power plants might be converted into kite hybrids. Its based on the idea that kite-driven cableways can be run into legacy plants, to the shafting of existing generators to contribute momentum, and the legacy fuel can be offset, or even phased out. Gas and steam turbines can be throttled back during wind, conserving coal, diesel, or natural gas, reducing carbon emissions. Water can be pumped by kite around a hydroelectric plant, conserving the reservoir for human and agricultural needs. A nuke might be decommissioned as such, and its generators and no-fly zone reused as a kite farm.
No other AWE scheme leverages existing power infrastructure with such capital advantage.
Rob CreightonFabric systems will not scale well to grid scale electricity, and are best suited for small off-grid applications in remote areas.
This is a claim to be tested directly against rigid wings. Current scale leaders, already in commercial production, are large membrane (parafoil) wings like SkySails of Germany, with a megawatt or two of output. KiteLab Ilwaco has extensively tested array methods and finds astounding scale potential for soft wing systems aggregated from many smaller (handy) membrane wings into "fractal megakites" "staked out" across the kite field. Spread anchors are an ideal passive stability factor, with the earth itself as "free" compressive structure. The harmonic frequency of such a vast kite structure is low, alllowing ground winching to keep up with control need,s even to fairly high altitudes. Ground based actuation is insensitive to mass-scaling limits. It does not easily grow too heavy, nor saturated by peak loads, nor severely limited in flight hours (500hr typical for flight-rated servos), nor require power aloft.
Its rigid wings that do not scale well, given cubic-mass scaling. Their power-to-weight ratio plummets far faster with scaling than membrane wings. They become terribly vulnerable to mishap and are far more of a threat to personnel and populations when they crash (soft wings hop right back up). They are far more expensive by unit power and require a far longer payback. Only when they achieve true airworthiness will they compete economicly in utility-scale aggregations. Meanwhile soft wings will also continue to improve. Kitelab has found that hybrid systems, of a soft kite lifting network hosting high L/D rigid power wing units, seems to be the optimal trade-off in the cuurent state-of-the-art.
Steve DavisHow would you allocate R&D funds among the three markets Bormann defined, from small to large? (e.g., 33% / 33% / 34%)
40% / 20% / 30%
For purposes of this discussion I categorized "balloon" as any fabric based Leading Edge Inflatable or Ram-Air wing. "Lighter-than-air" systems have poor lift/drag characteristics, and will prove incapable of generating power economically.
Fabric systems will not scale well to grid scale electricity, and are best suited for small off-grid applications in remote areas. This market is currently served by petroleum based generators, and has a levelized cost of energy 10 - 100 X grid electric. Small mobile AWE systems that can serve this market can have an immediate impact on the developing world, reducing their growth in carbon emissions and providing economic opportunity.
Steve DavisDo you agree that airborne wind systems can target each of these markets?
All AWE systems of any size will need no fly zones and safety areas, which in my opinion make the small turbine market not viable. I think that there will be some minimal rated power to make an AWE plant profitable, and it won't be in the kW range.
From our analyses a 1-GW AWE farm (average power during all year, taking into account the capacity factor) in a good location should have about 500-600 units with 3-4 MW rated power each, distributed over about 35 km^2, operating at up to 2000 ft above the ground. The density of average yearly power generated per unit area would be 6-10 times higher than the actual wind farms, but still it's a lot of land occupation. This is why I think that offshore AWE is very promising, however it's surely not viable for small scale plants
Steve DavisHow would you allocate R&D funds among the three markets Bormann defined, from small to large? (e.g., 33% / 33% / 34%)
I would allocate 5% / 25% / 70%, with offshore AWE research in the large scale market
From purely dimensional arguments one can deduce that the mass of (any) wind energy converter must scale like
m = k * P^1.5/v_W^2.5
The difference between concepts lie in the value of the proportionality constant k. The cost of the system is determined by the value of k and the complexity and cost of materials involved.
I propose that we publish k for different systems. For the current HAWT one can easily deduce this value.
The question is if the reduction in k for AWE is sufficient to offset the cost increase due to use of exotic materials and the increase in complexity? I think land based AWE is some time away from economic viability.
Clearly, the mass, and hence the cost of systems reduces rapidly if we operate in higher wind speeds. The first reaction is to go for high altitude winds, but tether drag and power transmission soon kills these ambitions.
My suggestion is that we should apply our minds to harnessing the wind energy in the southern oceans. This shifts the problem from energy conversion to how to store the energy. Any interest in this idea?
Reliability and certification are the main issues. When you talk about very large systems, it is virtually impossible to launch and recover the systems. This means they have to stay up indefinitely. This places severe constrainnts on relibility and then unfortunately, cost.
The complexity and efficiency of autogyros do not excite me. I think there is a future for very large airships.
Saul Griffith
People who believe in altitudes beyond 10000 ft probably haven't sufficiently modelled tether drag and tether mass in their systems, nor the statistics of high altitude wind speeds.
This is only true for single kites, Kite rigged in trains enable high altitude presence (to ~10000m even a century ago). A kite train acts much like a multi-stage rocket; kite lift is staged along the line for max altitude. Crosswind kite arches integrated with trains allow 3D latticework to fill airspace with wings far better than single-tether aircraft. Phased radial tugging enales persistent array flight in calm. Wind energy harvesting is just one application. Flying lattices can be horizontally isotropic to accept wind from any quarter and scale well beyond 10000ft in every dimension (a fractal megakite). A key is to keep massive generators, electrical conducters, and actuation based on the ground, for minimal mass aloft to maximal power. Lets not rule out high-altitude yet, but test the wonderful new ideas.
Summarizing recent comments by: Lorenzo Fagiano, Cristina Archer, Sara Smoot, Adam Rein, Robert Wilson, Peter Lynn, Saul Griffith, P.J. Shepard, Alexander Bormann, Carlo Perassi, Mark Moore, Ben Glass, Dave Santos, Martin Hoffert, Peter Lissaman and Joe Faust.
We're very pleased by the thoughtful comments that people are contributing. We also welcome your meta comments on the discussion software itself, including things that aren't working well for you and suggestions for new features.
Again, these summary points are meant to track the main points being discussed and help prevent you all from talking past each other. Ideally, we could get enough of you 'voting' on these summary points that the final report we write on this discussion can include quantitative indicators of this group's agreement. Click on the green and red squares that appear to the right of each point as a way of expressing whether you generally agree or disagree, respectively, with the statement. Or reply if the point needs refining or clarification.
Allocation Categories
This far, the discussion of what categories R&D should be allocated across has mostly revealed that this group include lumpers and splitters, with only a slight preponderance of the former. Near Zero is working on a version of the allocation matrix that will start simple and allow people who want to allocate to more specific categories to define those categories themselves, so it may make sense to table this discussion topic for now.
Scale / Markets
Two separate but related topics are (1) the overall scale of generation that the airborne wind industry should aspire to, and (2) the scale of individual projects--the size and location of target electricity markets.
More than one of you questioned whether terawatt-scale deployment was a realistic goal for the industry, implying that airborne systems are not likely to provide more than a few percent of global energy demand. Others of you seemed confident that airborne systems could ultimately supply useable energy at the terawatt-scale.
Can airborne systems compete with other energy sources in order to supply energy at the scale of terawatts?
Alexander Bormann defined three markets he imagines airborne systems could target: "[1.] small turbine market (up to 100 kW) related to individuals and small companies, [2.] mid-size market (0.5 - 10 MW, smart grid) linked to communities and enterprises, and [3.] the multi-megawatt market (10MW - X GW) controlled by the large energy firms."
Do you agree that airborne wind systems can target each of these markets?
Eric Blumer offered that he "...would spend 90% of the money on the MW+ capable solutions since this is where the biggest impact can be made and the largest commercial market exists."
How would you allocate R&D funds among the three markets Bormann defined, from small to large? (e.g., 33% / 33% / 34%)
Balloons
The comments on balloon-based (buoyant) systems note that they have advantages of simplicity, reliability, and portability, and imply that these systems could be well-matched to smaller (kW-scale) installations, perhaps as off-grid power solutions.
Does anyone dispute this niche or think buoyant systems can compete with dynamic airborne systems in the longer term?
High-Altitude
Mark Moore stated that "future AWE large-scale solutions will be taking place at altitudes at less than 2000 ft." Others encouraged that R&D of high-altitude systems should continue, presumably because there are barriers (e.g., energy transmission) that might be overcome.
What breakthroughs are needed to make high-altitude systems feasible?
Regulation
Several comments mentioned the regulatory hurdles confronting airborne energy systems.
What problems do existing/anticipated regulations pose to the systems being developed now?
Ganged kite trains with long-strong crosswinding set in integrated meshes may best mine the verticality or vertical thickness of the resource. These moving wall MegaKite systems on land could drive ground cable to turn legacy generators. Similarly in offshore. Gain from aggregate stability.
Mark MooreI think stating that AWE is going to harness the high altitude winds diminishes the credibility of this emergent industry.
Mark MooreI am also certain that the future AWE large-scale solutions will be taking place at altitudes at less than 2000 ft, with remote location and off-shore solutions. I think stating that AWE is going to harness the high altitude winds diminishes the credibility of this emergent industry. Maybe
It is not certain long term that 2000 ft is the limit, but it sure looks like a near term one.
People who believe in altitudes beyond 10000 ft probably haven't sufficiently modelled tether drag and tether mass in their systems, nor the statistics of high altitude wind speeds.
Martin Hoffertbandgap-tuned laser power beaming to PV arrays on the ground
low loss ?
A kytoon that self-regulated its hydrogen-inflation pressure self-made hydrogen from ambient atmospheric moisture for self-recharge healing low leakage could give full-time support to kites that could cross-wind fly to drive counter-weighted windward slanted booms that drive a groundgen. The kytoon would need only be able to support the mass of the working kite during nil wind. Become aware of the best that could be achieved for such a kytoon. Upon success, no shipping of helium. Trickle production of hydrogen aloft would permit such kytoon to be employed throghout the world. Dumping the hydrogen could be triggered through a smart device, as needed.
A crew of paid scale-model pros would be supported to make versions of hundreds of schemes to a working level for study. Plans for the small-scale working devices would be published free for worldwide review and duplication. Reports and comments then could come from people around the world before scaling to larger size or into kite-energy farms. http://www.energykitesystems.net/0/KITESA/FAQelectric/methods.html
Alternative strategy: List robustly all known AWE schemes. Put some attractive funding on each. Let two universities or colleges or high schools face one scheme, so a tensional competition on that scheme occurs. Spread the schemes to institutions throughout the world. Have the teams record all their steps and experiences. Video record. Specifications record. Tests. Keep under budget. Small bonus for the winners of each scheme. If 100 schemes, then 200 institutions and 100 awards of bonus. Meet deadline.
Yes, yes, yes! This is entirely the BIG point. One must have some good solid configuration studies to establish valid engineering ways of getting a WECS to altitude. Because there was no category "Confiduration", I assumed "Systems" meant approx. the same thing. But there's the rub -- what the hell's it gonna look like!!
Incidentally, just classify two lift systems: Dynamic and Bouyant, and dump the latter since the "recent" Hindenburg experiment.
Robert WilsonThe major problem for airborne systems is their economics with the project driving force being the potential energy production--the balloon systems are not worth the money to document their problems--the other approaches need a thorough system analysis which means that there must some fairly complete designs--so the major uncertainties that I see are in the selection and preliminary design of candidate systems.
My allocation is based on my judgement that autonomously stabilized autogyro architectures are a good bet for high duty cycle high-altitude wind kinetic energy harvesting for electricity on Earth. Priority R & D problems are (1) efficient, reliable platform stabilization and orientation to maximize power generation over time scales of years with electronic feedback controls and (2) low loss power transmission to Earth, either through tether wires or wirelessly in cloud-free areas by bandgap-tuned laser power beaming to PV arrays on the ground, the latter potentially synergistic for load balancing with large-scale solar-electric farms.
Mark MooreI think stating that AWE is going to harness the high altitude winds diminishes the credibility of this emergent industry.
Lets agree with Wubbo Ockels, that we should not constrain R&D directions based on opinion, but test them. Its true that there has been way too much hype about high-altitude AWE by unqualified teams. Lets use well designed high-altitude kite experiments to collect the data needed to validate altitude assumptions.
Steve DavisDoes this group agree that the goal of AWE R&D is systems that are feasible alternatives to carbon-based fuels such that they can be deployed at the scale of terawatts?
Terawatt-scale AWE is an essential design issue, as global needs are so great. Whatever the winners in the single-unit concept space, specific engineering concerns of aggregating single-units into gigawatt-scale arrays are not trivial, and must be explored with the utmost seriousness. I agree with Cristina that distributed AWECS also sum, so we should support R&D at both ends of the aggregation spectrum to make a terawatt-scale impact.
Lorenzo FagianoI think that any concept will have to be scaled up through "farms" of single units, so inn my opinion it would be better to first devise the concept that works best for a single unit, and then scale that concept to mutliple units, instead of studying immediately concepts with multiple wings or aircrafts.
We must study both directions at the same time, in fact, KiteLab Ilwaco has already been flying experiemntal arrays for several years. Any single farm unit can be lifted in large numbers by a kite array, but the classic and new methods are specialized and should continue to be studied, not stop and wait.
Saul Griffiththis has been done. there is no publishing venue for the results however (try publishing that in APL)
Just publish these results to the Web, if they are timely. There are Aerospace journals as well, but the Net is the new printing press.
Saul Griffithhigh velocity high mass is the wrong metric. it should be mass versus power output in which case high velocity crosswind systems will smack the pants of all other systems because of square and cube relationships. can you please give any support with numbers for low velocity low capital systems ?
Saul Griffithsupervised autopiloting is not really an issue here.
Supervised Autopiloting is proposed as a realistic operational design for early giant kite farms with economy-of-scale. Its meant to distinguish between exaggerated VC claims of full automation ("launch and forget") which will take longer to prefect. FAA regs currently call for a PIC (Pilot In Command) for all UAS (unmanned aircraft systems). KiteLab Group proposes compliance with existing norms as a sensible early reality, and sees 2025 NextGen airspace as the full-automation regulatory horizon.
Saul Griffithhigh velocity high mass is the wrong metric. it should be mass versus power output in which case high velocity crosswind systems will smack the pants of all other systems because of square and cube relationships. can you please give any support with numbers for low velocity low capital systems ?
High-Velocity High-mass is the right FAA metric for classing aircraft. This relates to Pete Lynn's concern about regulatory issues. The numbers are found in FAA regulations, let me know if you have any problem finding them; they are the basis for AWEIA's AWE ConOps. Larger faster aircraft are far more regulated due to higher-consequence safety-critical issues. By "Mass versus power output" you restate my "power to weight" note, so we agree on that being a critical metric, as well as the dominance of crosswind dimension.
I would allocate the bulk of the funding towards balloon and fixed wing focused research. Both of these concepts have advantages (namely crosswind power augmentation for fixed wing and simplicity, reliability and thus a shorter path to market for balloons) and challenges (reliability while managing upfront and O&M cost for fixed wing and low cost, low weight structures for balloons.) The autogyro concept, in contrast, misses out on the main advantages of both categories and has yet has many of the same challenges.
I have allocated roughly 30% of funds to each of System Integration, Hardware Engineering and Controls & Software, which are critical areas of research to get AWE to market. Materials Science is less of a focus because existing materials are largely adequate to bring AWE to market, and the research here should come further down the line in an effort to further reduce cost, improve reliability. Reduced time to market should be a key focus.
One of the things I would like to see out of this group discussion, is to come up with a basis of agreement of certain key principles for AWE - essentially a goal for the community.
For instance, while I still do not know the best approaches to distributed and large scale power production, I do know that both are important markets to support. I am also certain that the future AWE large-scale solutions will be taking place at altitudes at less than 2000 ft, with remote location and off-shore solutions. I think stating that AWE is going to harness the high altitude winds diminishes the credibility of this emergent industry. Maybe someday it will be possible, but it doesn't make sense to talk about it now, before we get operational units at lower altitudes. I would also like to reach a consensus of how large of a market AWE would be targeting (1%, 5%, 20% of energy needs). But the greatest need is to understand the true costs, in comparison to HAWT solutions.
Saul Griffiththis has been done. there is no publishing venue for the results however (try publishing that in APL)
This is part of the fundamental problem - there are too few published papers that let the AWE community mature, and sharing of results and lessons learned. We need to get sessions established at a regular conference, with MANY publications that share results. But what is the best venue? I'm not sure, and that's why I put together a session at the AIAA ATIO conference in Sept, 2011 to see how much participation we could get with the AIAA, instead of the Wind Energy conferences.
Steve DavisDoes this group agree that the goal of AWE R&D is systems that are feasible alternatives to carbon-based fuels such that they can be deployed at the scale of terawatts?
TeraWatts? Well... I know that I should try to "think big" but not *that* big at the moment. :)
Steve Davis3. They will have problems with helium supply if they are to be lighter than air.
Yes, indeed. Helium prices may reach their multiple of the todays prices soon. Mayor sources from the US are vanishing and secondary sources from Russia are facing much higher extraction costs due to the lower fraction of Helium. When all the natural gas is gone and we need 100% renovables - there will be no more helium at all?
And no, hydrogen - used by few adveturists travelling in remote areas in their balloons with the mobile phones switched of - is not an alternative today.
Saul GriffithWhy fund things that are not scalable? In a resource constrained (time, capital, people) world
There are many off-grid places in the world that need a little bit of power now much more than they will need a lot of power later. We need both small distributed and utility scale solutions.
The market perspective.
No doubt, asking for multi Mio.€ R&D has to be backed with adequate returns from huge markets. And yes, in the first world the energy marked is still quite centralized, controled by few big enterprises, demanding utility scale solutions in the GW range.
However 50% of the world is not grid connected, and wont be. The wind blows rarely where energy is needed ("Fish dont needs electricity" as Alois Wobben says). Independency and security are great arguments for smaller scale projects in renewables - and this number is growing. The large scale production might be very profitable but not be the most economic solution for the final costumers.
Thus one may distinct between the
- small turbine market (up to 100 kW) related to individuals and small companies,
- mid size marked (0,5 - 10 MW, smart grid) linked to communities and enterprises and the
- multi-megawatt market (10MW - X GW) controlled by the large energy firms. Future markets may even look different from these categories.
Markets and geographical locations have different constraints which are highly effecting the system design, entry barriers, time to market and economy. Thus in this discussion i propose to clearly dedicate our ideas to the final product (size and function) and the markets we have in mind.
Returning to the question where should "all the funding go" i would appreciate, if this discussion encourages a varyity of AWE system developments which then compete in terms of well working systems with their specific advantages and disadvantages.
Lighter weight, stronger tether materials that withstand heating without stretching as much. Lighter weight magnetic materials for use in power generation. A large part of needed development work is straight forward engineering applying known concepts in new ways. The biggest barrier to industry development is simply lack of funding to get across the first valley of death. Paid for test set up and test time for 5-30 kW prototypes in large wind tunnels would also help. Regulatory concerns must also be addressed so that investors aren't scared off between the first and second valleys of death. (FAA said to be releasing first AWE rule for 6 month comment period this month.)
Peter LissamanImpossible to judge merit without some preliminary calcs for each system.
There
this has been done. there is no publishing venue for the results however (try publishing that in APL)
Pete LynnAnother point I might make is that economic models rarely incorporate development costs and time to market. A design that ultimately costs a little more but which costs far less to develop and which gets to market much faster may well be a better economic proposition. Especially if it helps prepare the way for better systems. The cheapest and fastest airborne wind power system to develop, which is competitive with coal, is perhaps not an un-useful metric.
i don't believe this to be an issue at scale (GW to TW, because development costs are delta on any sufficiently successful product).
Dave SantosA major divide in contending schools of utility-scale AWE is between high-mass high-velocity high-capital-cost fully-autonomous designs and low-mass, lower-velocity, low-capital-cost alternatives that use supervised auto-piloting. Issues of airwortiness, insurability, and stakeholder acceptance are involved. Lets allow distinction within the broad categories to sort out these issues.
supervised autopiloting is not really an issue here.
high velocity high mass is the wrong metric. it should be mass versus power output in which case high velocity crosswind systems will smack the pants of all other systems because of square and cube relationships. can you please give any support with numbers for low velocity low capital systems ?
Cristina ArcherNot clear why their tethers would be more expensive ...
Because they require carrying more tension per unit of power. This means more material per unit of power. Because of cube law 1/2.rho.A.Cl.v^3 (grossly) this is seriously a problem.
There is a significant field in tensarity wind turbine designs that attempt to incorporate the best of both worlds, perhaps these should be included in the analysis? This might also provide a more direct comparison to conventional wind turbines. Such designs can be of particular interest with regard to lowering the developmental entry barriers, enabling a lower cost and more evolutionary development of airborne wind power.
The three major advantages of airborne wind power are avoidance of a tower, avoidance of blade bending moment with operation of all the blade at tip speed, and, in some cases, avoidance of heavy, expensive and maintenance prone gear boxes. The major constraints of fixed wing approaches are tether drag and crashing. Hence, an interesting development path is to operate a fixed wing kite power system from the top of a conventional wind turbine tower. This prevents crashing, greatly shortens tether length and drag (no cosine cubed power loss due to average tether elevation angle being zero), enables passive control systems, and should still come in at around half the cost of conventional wind power. It also scales down better and can fit into existing wind farms. While long term this has a higher cost per kilowatt hour than a pure kite power system, the near term cost might be significantly less. I would now advocate this as an easier development path for kite power generation.
I have made a number of small prototypes of such hybrid wind turbine kite power systems, and did not see any serious development problems. Further, by using a free pivoting counter weighted tensarity tower (much lower cost than a conventional cantilevered tower, and without the foundation bending moment), it is possible to bring the fundamental long term per kilowatt hour cost down close to that of a pure kite power system. The tower cost is somewhat mitigated by the inability to crash into the ground and the lower control costs.
While capacity factor is improved by greater height, system mass and hence cost also scales with height. If memory serves, a tether a kilometer long will likely weigh (and cost?) as much as the rest of the system. And so at the economically optimal tether length, greater capacity factor actually tends to come from being able to sweep more wind for less cost, enabling design for lower average wind speeds.
Another point I might make is that economic models rarely incorporate development costs and time to market. A design that ultimately costs a little more but which costs far less to develop and which gets to market much faster may well be a better economic proposition. Especially if it helps prepare the way for better systems. The cheapest and fastest airborne wind power system to develop, which is competitive with coal, is perhaps not an un-useful metric.
Steve Davis1. They are not effective enough since they do not exploit crosswind motion (i.e. they have low efficiency of energy extraction).
Partly disagree. CyberKite represented a hybrid (aerodynamic/aerostatic), self supporting airfoil with reasonable aerodynamic properties. These hybrid wings performed crosswind flying and could generate small amounts of energy even at very low air speeds. Overall the system would be more efficient and less expensive with out the LTA component. Its suited for temporarily use however.
No mat. science or hardware issues.
And not much problem of control.
This is ENTIRELY a configurational exercise, involving means of elevating energy extraction system to exploit higher wind speed, and actual means of mechanical energy extraction. Since the config is so amorphous, it is desirable to select few disticnt configs and conduct first order engineering analysis on same to get some feeling of energy extraction for diffferent configs. All this can be trivially "optimized" by standard MDO techniques, once there is a config to optimize. There is also a huge distinction between mechanical energy conversion to electrical aloft, or on the ground. Impossible to judge merit without some preliminary calcs for each system.
There is also an operational issue related to handling arrays of AWE during wind shifts or calms, and getting arrays aloft after a calm.
Once a config has been selected elementary calcs can be used to estimate energy production, and less definite calcs for weight and cost. From these only can any rational sytements be made about the installed cost and operating costs.
Steve Davis1. Add dimension of where electricity is generated to the chart (i.e. are generators ground-based with energy transmitted mechanically down the tether or are the generators aboard the aircraft with energy transmitted electrically down the tether?).
This dimension would be covered within the scope of a main investigration--the idea being to determine the best configuration--adding this as a investigation would br limiting rather than broading to the overall project.
Steve Davis3. They will have problems with helium supply if they are to be lighter than air.
Helium will be expensive, but it is possible to design buoyant systems that have extremely low leakage rates. Hydrogen is another alternative gas which could be used in place of helium, which would have higher leakage, but could be replenished with onsite electrolysis.
Steve Davis3. They will have problems with helium supply if they are to be lighter than air.
Helium will be expensive, but it is possible to design buoyant systems that have extremely low leakage rates. Hydrogen is another alternative gas which could be used in place of helium, which would have higher leakage, but could be replenished with onsite electrolysis.
Steve Davis1. They are not effective enough since they do not exploit crosswind motion (i.e. they have low efficiency of energy extraction).
They are not AS effective, but it is inaccurate to state that they are not EFFECTIVE, as they can extract energy. Since a non crosswind is only generating ~1/20th as much energy, a bouyant system would need to cost 1/20th as much to achieve the same effectiveness. But it is potentially possible...
Saul GriffithMaterials science is not really the issue for any of the systems, existing materials are compatible with all problems. Tethers do not require anything more exotic than e-glass, carbon fiber, or high tenacity high strength polymers. Wings do not need anything more exotic than fiber composites. Most (flying generator) systems (either auto-gyro or fixedwing) do not require a lot of rare earth materials that would necessitate weight reduction. Higher apparent wind speeds born of high wing efficiencies enable fixed wing systems to run generators at far higher speeds and further reduce generator materials.
As far as getting a working protype quickly I agree, there are materials that can get the job done. In the long term, for endurance and increased efficiency, espeically for systems to opperate at higher altitudes materials become very important. Consider, conductive losses for systems transmitting power via tethers. Weight of the wings is also critical, advances in ligher, stronger and less prone to fatigue materials will be extremely important to ecconomic feasability in the long run.
The major problem for airborne systems is their economics with the project driving force being the potential energy production--the balloon systems are not worth the money to document their problems--the other approaches need a thorough system analysis which means that there must some fairly complete designs--so the major uncertainties that I see are in the selection and preliminary design of candidate systems.
The major uncertainty for fixed-wing technology is operational feasibility. These systems are by far the most energy efficient especially as large commercial generators, but require much more work and risk to operate. Balloon technology maintains operational simplicity and works better for portable generators. Hardware and materials for endurance and portability are drivers here. Autogyros don't have much advantage over either of the other two systems.
Steve DavisDoes this group agree that the goal of AWE R&D is systems that are feasible alternatives to carbon-based fuels such that they can be deployed at the scale of terawatts?
I would be happy with the gigawatt scale. Also, there are many small-scale applications that would not add up to many MW or GW but would still be profitable (e.g. remote areas).
Steve Davis2. The higher cost of tether materials related to their lack of aerodynamics/high-level of drag.
Not clear why their tethers would be more expensive ...
Steve Davis1. They are not effective enough since they do not exploit crosswind motion (i.e. they have low efficiency of energy extraction).
Crosswind motion is the same principle of the blades of wind turbines. The only floating devices that, I think, it might be interesting to investigate are those with an onboard turbine, e.g. Altaeros' shroud. However, I think that in these cases quite easy calculations can be made without building anything, to see if it's viable. How big shall be a balloon to sustain the equivalent of, e.g. a 2-MW wind turbine's nacelle and rotor (approx. 120 tons, looking at data for Vestas 90m towers)? What would be the cost? Also the trust forces would be well-known in this case.
Steve DavisDoes this group agree that the goal of AWE R&D is systems that are feasible alternatives to carbon-based fuels such that they can be deployed at the scale of terawatts?
I definitely believe that the main goal should be technology to be deployed in farms of GW range each, to have a viable alternative to fossil fuels and nuclear. Theoretical studies and simulations demonstrated that the potential is there. These studies are based on well-assessed aerodynamic laws and measured wind data. The question is whether it is possible to design and realize a machine able to exploit this potential. The final goal should be to have a single units in the range 2-MW to 10-MW each
Steve Davis1. They are not effective enough since they do not exploit crosswind motion (i.e. they have low efficiency of energy extraction).
But they may have other advantages, such as simpler controls due to better stability.
Steve Davis2. Add dimension of autonomy to the chart (i.e. distinguish aircraft that require supervised auto-piloting from those that are fully autonomous)
Steve Davis3. Disaggregate the "fixed-wing" into separate columns for soft wings (parafoils) and hard wings (e.g., aluminum/carbon composites) in the chart.
Keep things simple
Steve Davis5. Add hybrid systems (e.g., rotor and wing) as a distinct column in the chart.
I think that this distinction is already encompassed by the distinction between ground-level and onboard generators, unless I missed something
Steve Davis4. Add multi-unit flying arrays as a distinct column in the chart (e.g., TUDelft's Laddermill and Spidermill, Kitelab's 3D lattices of wings, or what Dave Santos describes as "kite units crosslinked in flying formations").
I think that any concept will have to be scaled up through "farms" of single units, so inn my opinion it would be better to first devise the concept that works best for a single unit, and then scale that concept to mutliple units, instead of studying immediately concepts with multiple wings or aircrafts. Some studies have been already done for multiple units, for example the theory and simulations say that a single unit on a carousel (ground units pulled by wings on a circular path) has the same theoretical power generation potential of a single unit in "pumping" mode, or a single wing with onboard turbines.
Instead of multiple units, I'd rather try to investigate offshore solutions. In fact, traditional wind technology is having many problems for offshore, and it's still an "open" field. AWE can have strong advantages in the offshore context but the development challenges are of course different w.r.t. inland solutions. A practical idea would be to convert oil rigs that need decommisioning into laboratories for offshore AWE. It would also be a nice advertising message
Steve Davis3. Disaggregate the "fixed-wing" into separate columns for soft wings (parafoils) and hard wings (e.g., aluminum/carbon composites) in the chart.
Like for ground level and onboard generators, also this difference implies different aspects of that need R&D. Control systems for rigid wings are more advanced thanks to the technologies in aeronautic engineering. Both concepts need specific designs aimed at generating power
Steve Davis1. Add dimension of where electricity is generated to the chart (i.e. are generators ground-based with energy transmitted mechanically down the tether or are the generators aboard the aircraft with energy transmitted electrically down the tether?).
I think that this difference is important and that the R&D needs are different for the two. As an example, ground level generators need to improve and optimize the energy generation cycle, while onboard generators are more advanced from that point of view, but may have other aspects that need R&D. I think it would be good to have these two as categories and to be able to allocate different amounts of funding between the various aspects (controls, materials, aerodynamics etc) of each category
Steve Davis2. Add dimension of autonomy to the chart (i.e. distinguish aircraft that require supervised auto-piloting from those that are fully autonomous)
I think that all concepts will have to be largely autonomous. Human supervision will always be needed in AWE farms (like there is personnel in nuclear plants or thermal plants), however in my opinion it is not viable to have every single generator continuously supervised
Summarizing comments by: Dave Santos, Pedram Mokrian, Saul Griffith, Lorenzo Fagiano, JoeBen Bevirt, Ken Caldeira, Carlo Perassi, Martin Hoffert, Eric Blumer, Cristina Archer, and Peter Lynn
Thanks to everyone who is participating, especially those of you who ran across bugs and brought them to our attention.
We'll be using these summary messages as a way of identifying areas where many of you seem to agree, as well as important points on which there seems to be fundamental disagreement. Feel free to click on the green and red squares that appear to the right of each point as a way of expressing whether you generally agree or disagree, respectively, with the statement. Or reply if the point needs refining or clarification.
Allocation Categories
Toward the end of this discussion, we plan to conduct another, more detailed survey that will probably include some version of the allocation exercise that starts this discussion. So if most of you agree that different dimensions or categories would make your answers more meaningful, we can restructure the chart. Changes that have been suggested include:
1. Add dimension of where electricity is generated to the chart (i.e. are generators ground-based with energy transmitted mechanically down the tether or are the generators aboard the aircraft with energy transmitted electrically down the tether?).
2. Add dimension of autonomy to the chart (i.e. distinguish aircraft that require supervised auto-piloting from those that are fully autonomous)
3. Disaggregate the "fixed-wing" into separate columns for soft wings (parafoils) and hard wings (e.g., aluminum/carbon composites) in the chart.
4. Add multi-unit flying arrays as a distinct column in the chart (e.g., TUDelft's Laddermill and Spidermill, Kitelab's 3D lattices of wings, or what Dave Santos describes as "kite units crosslinked in flying formations").
5. Add hybrid systems (e.g., rotor and wing) as a distinct column in the chart.
In the case of 1. and 2. above, does autonomy or the airborne versus ground-based apply to some types of crafts more than others? If so, these dimensions might be incorporated into our allocation chart with the addition of a couple new columns.
If, however, they are applicable to all types of crafts, would the allocation exercise be improved by eliminating the different areas of research "e.g., materials science, controls and software" and instead using rows to distinguish the dimensions of autonomy and location of electrical generation?
Balloons
Saul Griffith, Lorenzo Fagiano, JoeBen Bevirt, and Carlo Perassi all made comments critical of balloon-based systems, arguing that they cannot yield cost-effective energy and will not scale. Several others allocated only small amounts of the hypothetical R&D to balloons. It would be useful to know if it is a widely held belief among this panel that balloon systems (or as Saul Griffith termed them, "hovering non-aerodynamic lift-based" systems) are fundamentally flawed choices for generating energy from winds at altitude?
If yes, what are the key disadvantages of balloon-based systems? Several specific characteristics have been mentioned:
1. They are not effective enough since they do not exploit crosswind motion (i.e. they have low efficiency of energy extraction).
2. The higher cost of tether materials related to their lack of aerodynamics/high-level of drag.
3. They will have problems with helium supply if they are to be lighter than air.
Scale
Related to the discussion of balloons, there is a question of whether the goal of R&D in to establish AWE systems that can economically provide energy at large scales. Carlo Perassi allows that "[Balloons] could have their market...[but] they don't scale." Saul Griffith thinks it is "...prudent to chase things that at least have the potential to scale," but acknowledged that "...there might be room for a niche in small markets in remote areas."
Does this group agree that the goal of AWE R&D is systems that are feasible alternatives to carbon-based fuels such that they can be deployed at the scale of terawatts?
Ken CaldeiraAn iterative approach may make sense. How would an iterative approach work? Would you fund a broad portfolio and then winnow down? What would the winnowing process look like? How could you distinguish between a good team pursuing a bad idea and a bad team pursuing a good idea? Was failure due to the team or the underlying concept? Are there some concepts that could be winnowed out now?
The iterative spiral tests, analises, and winnows at every turn. The only urgent thing to winnow now is dangerous R&D inconsistent with aviation safety-cuture norms, which does allow science to advance. The techncal winnowing process is data-driven. Early to be winnowed will likely be those concepts with unavoidably low power-to-weight (aloft) or clearly excessive capital and operational overhead, compared to contenders. A good team will not follow a bad idea too long, but promptly switch to a better idea. A team (or individual) with a great idea, but incapable of demonstrating it, can be validated by a university aerospace team that finds merit in the concept, and champions it to a successful demonstration.
Ken CaldeiraIf you were designing a research program at a high-level that youo were going to try to sell to Congress, what categories would you suggest would be at the highest level? Should specific strategies even be represented at the highest level?
The aerospace veterans active in AWE seem to be of one mind with Fort Felker of NREL, who opined that the US govenment would be best served by a "balanced portfolio" of AWE R&D. Wobbo Ockels, Dutch astronaut and aerospace professor at TUDelft, stresses the need to test all ideas without prejudice. The losers generate useful lessons and end doubts over mistaken claims. Dave Lang, a top tether-dynamics expert, NASA glory-days scientist-engineer, and Drachen Foundation board member, calls for every concept to "have its day in court"; to be fully tested in a sound framework. Congress need not ponder specific contending concepts, but let good science take its course.
There can be a bit of a trade off between cost and time of development and ultimate cost per kilowatt hour. Fixed wing approaches tend to maximize swept area for system mass/cost, but they can also take longer and cost more to develop. I would also add the proviso that unless the ultimate cost is potentially less than coal, then it is probably not worth pursuing.
Control is ultimately solvable and cheap, the technology is continually getting better and costs are coming down, but it may take time to get there.
Regulatory hurdles and reliability/longevity will likely require the most development effort, noting that this has been solved for aircraft. But keeping in mind that solving these problems for less than the cost of coal is non trivial.
Saul GriffithNot all system architectures are mentioned here, but the general classes are covered.
A key omission is multi-kite architectures like the TUDelft laddermill and spidermill and Kitelab Group's concepts for vast 3D lattices of wings. Individual kites, as currently known, are severely scale-limited by operational and structural scaling-law to perhaps a megawatt or two. Only kite units crosslinked in flying formations can create true utility-scale power without excessive air and land sprawl. These architectures deserve their own ontological class in AWE R&D.
Saul GriffithThe classes are vague, but I believe the broad classes are covered (hovering non-aerodynamic lift based (balloons)), hovering lift based (auto-gyro, in which category I'd also put multiple-rotor craft), and (fixed wing (which can be soft or hard that exploits the aero-dynamics of cross-wind flight).
A major divide in contending schools of utility-scale AWE is between high-mass high-velocity high-capital-cost fully-autonomous designs and low-mass, lower-velocity, low-capital-cost alternatives that use supervised auto-piloting. Issues of airwortiness, insurability, and stakeholder acceptance are involved. Lets allow distinction within the broad categories to sort out these issues.
JoeBen BevirtI believe that low altitude crosswind systems hold the greatest nearterm promise and so resources should be focused on this effort.
While i agree that low-altitude crosswind is a near-term winner, especially with low-complexity low-mass passively-stable designs, we should make a balanced investment in long term opportunities, like perfected autonomous flight, and dense multi-kite arrays able to aggregate power to match the largest utility-scale generators (~700MW). We must not neglect high altitudes just because many early concepts are not favored at height.
Saul GriffithA lot of this has already been done in both academia and private companies. The work is good, the fundamentals are understood. I do not believe the industry needs more studies of comparitive testing. We need tests that remove specific risks and unknowns that remain.
The testing suggested would fly autonomous E-VTOL AWECS like Makani's Wing 7 against comparable (by power) ground-based supervised-automation contenders like WindLift for extended periods, to reveal performance and safety-critical issues in a capital-cost and operational context. Such comparative testing should be under the auspices of qualified third-party validators, like academic aerospace departments, and has yet to occur. Later in our evolutionary cycle such testing should involve thousands of flight hours in a full-scale fly-off format. Such comparative testing formats help "remove specific risks and concerns that remain', especially for investors and policy makers.
I believe the fixed wing solution is the most efficient, economical and certifiable for large MW+ platforms. For 100 kw solutions the balloon and autogyro solutions are probably preferred. I would spend 90% of the money on the MW+ capable solutions since this is where the biggest impact can be made and the largest commercial market exists. The US has a significant ability to build aerospace equipment. Major OEM's like Honeywell have a majority of the technologies required for a solution. It appears much of the money to date has been spent by small or new companies in airborne wind power reproducing technologies that already exist. I am very impressed with these efforts, but I am sure they would be much farther along if they were using all available technologies. These include flight controls, structures, motors, motor controlers, avionics, guidance and navigation, etc. I believe the tether is the least proven and highest risk technology, but I expect there are developments that I don't know about in this.
The question is not if airborne wind power can be done, but once it is done will it have a large enough market to sustain and make a significant difference. The funds should be spent to get a MW+ system fielded with the best and most credible aerospace technologies available to mitigate the commercial risks associated with the market. The teams would include both large aerospace OEM's with some of the best small businesses. 150 M$ would be enough to field multiple solutions with MW+ power generation capabilities with major aerospace companies. A large amount of the equipment is off the shelf. The large OEM companies would add 10-50% cost share to increase the total spend. This would give the data required for the market to assess the business cases and grow on its own where it makes sense.
I 'm having a technical issue with the response software, particularly the reallocation of research funding subsumed under the general category of airborne wind, which I can't figure out how to change. Basically, from my personal experience flying kites and radio-controlled gliders and electrically-powered aircraft, as well on online videos I've seen of various tethered flyers aimed at extraction kinetic energy from winds aloft, where they are normally highest in intensity and power available per unit frontal area, the major problem is stability and control for almost all designs, followed by getting power to the surface when it's generated at altitude.
Dynamic stability and attitude control is crucial for all designs based on aerodynamic lift, whether autogiro or fixed wing. (I'm personally not crazy about buoyant lift devices for the same reason that helium airships haven't made the comeback as fuel- efficient passenger and freight delivery systems in aerospace technology that their adherents keep trumpeting: They are very hard to control in high winds, which is precisely where they are need for this application.
Whatever method is used to suspend the WindPower generators at higher altitudes, it will be necessary to maintain their attitudes relative to pitch, roll and yaw axes in and constantly varying local wind and turbulence environment over extended periods of days to years; and this will require some kind of gyroscopic active feedback on aerodynamic control surfaces. As the Wright Brothers learned, for heavier than air flight, the problem is not so much maintaining lift forces sufficient to keep the machine in the air as to stabilize the flight either actively or passively enough to prevent a crash. Many of the Wright Brothers early test pilots gave their lives learning that lesson and it still happens.
So I would put the bulk of my R & D money for airborne wind into stabilization and attitude control with a covert goal of keeping the platform in the air for extended periods. If the stabilization is by gyroscopic and accelerometer sensors feeding their signals back to control surfaces, I would look carefully at the energy requirements of these systems. Will they be battery powered rechaged onboard from the same wind kinetic energy driving the power geneati
Being short: balloon doesn't require too much research compared to kites/wings systems... and IMHO they don't scale too as kites. They could have their market, of course but that's not about R&D. Kites is new, there are so many things to do. Trust me: too many people around underestimate this field (we underestimated it in the past and we are doing our best to stop acting like that).
Ken CaldeiraHow could you distinguish between a good team pursuing a bad idea and a bad team pursuing a good idea?
If the team can't deliver a working white paper that sufficiently describes the physics such that a master's level engineering student could determine that the idea was good, then it is a bad team.
If the master's level engineering student can determine that it was a bad idea, then it is probably a bad idea.
Ken CaldeiraBut then what about balloons? Aren't they perhaps a near-term answer but not a scalable long-term answer?
Why fund things that are not scalable? In a resource constrained (time, capital, people) world, it would seem prudent to chase things that at least have the potential to scale.
Ken CaldeiraSome people are trying to address the problem of providing low-cost clean energy that can be sold to markets within the next few years, where cost is paramount and scalability secondary.
It is unclear what the difference is here. Depends upon what you mean by low cost ? It would seem if traditional wind energy is 6-10c/kWh (onshore) and 10-25 offshore, that the bar is set. 40c/kWh might be a price against diesel, so there might be room for a niche in small markets in remote areas, but I'd advocate allocating funds in proportion to solving the large problem.
It seems that several different problems are being addressed here. Some people are trying to address the problem of providing low-cost clean energy that can be sold to markets within the next few years, where cost is paramount and scalability secondary. Others are trying to solve the long-term energy-carbon-climate problem where getting something into the marketplace quickly might be less important than finding a scalable approach that might take longer to develop. Would it make sense to split R&D funding according to what problem whether the technology is addressing the near-term problem or the long-term problem? (Or is the only way to address the long-term problem to begin addressing the near-term problem? But then what about balloons? Aren't they perhaps a near-term answer but not a scalable long-term answer?)
Dave SantosAn early comparative testing phase done with just a few million dollars could lead to a more objectively informed allocation of the suggested 150 million in resources. Poll results may well be a misleading sum of prevailing biases.
An iterative approach may make sense. How would an iterative approach work? Would you fund a broad portfolio and then winnow down? What would the winnowing process look like? How could you distinguish between a good team pursuing a bad idea and a bad team pursuing a good idea? Was failure due to the team or the underlying concept? Are there some concepts that could be winnowed out now?
Dave SantosThe categories were vague and did not reflect the full range of major options. No choice was allowed for hybrid systems (like, say, rotor and wing) or multi-unit flying arrays (trains, arches, and "clouds"). In Fixed-Wing, no distinction was made between soft wings (parafoils) and hard wings (alu, carbon, etc. composites). No distinction was offered between low and high complexity approaches, ground-based v. flying generators, and other key engineering choices.
If you were designing a research program at a high-level that youo were going to try to sell to Congress, what categories would you suggest would be at the highest level? Should specific strategies even be represented at the highest level? Perhaps a R&D program should be oriented around research areas (e.g., control systems, aerodynamics, materials science, etc) and not around strategies. Or maybe it is better to have teams working on getting specific strategies working.
My first impression was that lighter than air structures would be low cost but once dilligenced they seem expensive on a $/Watt basis.
We spent significant time on high altitude autogyro systems. This effort left me with concerns about component fatigue from cyclic loading.
I believe that low altitude crosswind systems hold the greatest nearterm promise and so resources should be focused on this effort.
Dave SantosWhy an opaque process? Would not a transparent public policy deliberation process have many advantages? Will DOE force a secretive culture on the AWE field. or allow us our open knowledge culture? Who would do the R&D? Academia, VCs, and government are very different animals. I would love to see academia take a lead role in the early engineering-science.
I agree in that to carry out R&D in universities and research centres is probably the most effective way to tackle the uncertain aspects of the different technologies. Publishing the results allows a faster overall progress, moreover in academic research there is less urge to have a positive result and more ideas can be tried out. Finally, large technical universities have access to a range of expertise in all of the involved technical areas, which I think is not matched by any of the actual companies in the field. However, the funds for this kind of research can come only from public bodies, since I think no company or VC would ever give money to academia, knowing that the results will be available to competitors, and the actual level of public funding for AWE is extremely low.
Research in companies is more focused and aimed at reaching a working product as soon as possible, but I think that for AWE it's still too early. I believe that, with some sort of collaboration/coordination of R&D efforts among all players, the main bottlenecks could be resolved faster, and then the subsequent optimization of the system can proceed in a more usual, competitive way
Lorenzo FagianoBalloon systems are not effective enough since they do not exploit crosswind motion. The other two types are promising but need R&D. At the present stage, I think that the major uncertainties to be reduced to demonstrate the technology are in the materials (e.g. resistance of lines and wings), control systems (in case of exceptional weather conditions, high wind variability, etc) and power conversion. On the long run, however, there is a lot of R&D to be done to improve and optimize the concepts, in all of the involved fields (aerodynamics, materials, control systems, power electronics, mechanics etc.).
Cross-wind motion is not well understood by people outside the practitioners, and this is the fundamental advantage over traditional wind (investors, even academia still don't quite get this as it is not an intuitive physical phenomenon). There has not been enough publishing on this fact, however it is well described as early as the mid 1970's (Miles Lloyd).
Dave SantosAn early comparative testing phase done with just a few million dollars could lead to a more objectively informed allocation of the suggested 150 million in resources. Poll results may well be a misleading sum of prevailing biases.
A lot of this has already been done in both academia and private companies. The work is good, the fundamentals are understood. I do not believe the industry needs more studies of comparitive testing. We need tests that remove specific risks and unknowns that remain.
Dave SantosThe categories were vague and did not reflect the full range of major options. No choice was allowed for hybrid systems (like, say, rotor and wing) or multi-unit flying arrays (trains, arches, and "clouds"). In Fixed-Wing, no distinction was made between soft wings (parafoils) and hard wings (alu, carbon, etc. composites). No distinction was offered between low and high complexity approaches, ground-based v. flying generators, and other key engineering choices.
The classes are vague, but I believe the broad classes are covered (hovering non-aerodynamic lift based (balloons)), hovering lift based (auto-gyro, in which category I'd also put multiple-rotor craft), and (fixed wing (which can be soft or hard that exploits the aero-dynamics of cross-wind flight).
Balloon systems are not effective enough since they do not exploit crosswind motion. The other two types are promising but need R&D. At the present stage, I think that the major uncertainties to be reduced to demonstrate the technology are in the materials (e.g. resistance of lines and wings), control systems (in case of exceptional weather conditions, high wind variability, etc) and power conversion. On the long run, however, there is a lot of R&D to be done to improve and optimize the concepts, in all of the involved fields (aerodynamics, materials, control systems, power electronics, mechanics etc.).
Not all system architectures are mentioned here, but the general classes are covered.
Balloon based systems exhibit entirely too much drag, very low efficiency of energy extraction, low efficiency materials use, and problems with helium supply if they are to be lighter than air. As very large bluff drag bodies they will require much heavier tethering systems. I cannot imagine any scenario where they become cost competitive with the other options and consequently would allocate very little funding. (though balloons should probably get seed funding for studies into low energy cost long distance transport).
System integration challenges are similar between autogyro and fixed-wing. So the investment goes far either way, although I'd put more eggs in the fixed wing basket as it shows high efficiency and lower cost in most people's models.
Materials science is not really the issue for any of the systems, existing materials are compatible with all problems. Tethers do not require anything more exotic than e-glass, carbon fiber, or high tenacity high strength polymers. Wings do not need anything more exotic than fiber composites. Most (flying generator) systems (either auto-gyro or fixedwing) do not require a lot of rare earth materials that would necessitate weight reduction. Higher apparent wind speeds born of high wing efficiencies enable fixed wing systems to run generators at far higher speeds and further reduce generator materials.
Controls is extremely important as the fundamental problem of airborne wind energy is really a problem of autonomous control for very long periods of time (think of it as substituting controls for concrete in comparison to existing turbines). Hardware engineering needs an outsize portion of budget despite the fact the engineering is not that difficult, because the wings need to be large to prove scale and efficiencies and large one-off aircraft prototypes are not terribly cheap. Sub-scale prototypes are useful for learning, but the industry is beyond that stage and needs full scale deployable models to prove the economics, safety, and systems to utilities, investors, and energy companies.
There are other system architectures not mentioned here, but they are almost all less efficient or cost effective in reasonably exhaustive modelling that has been done to date.